



BoxDroid V2(Improved Version)
Hi guys!!
Quite sometimes I'm not updating my project. This time, I'm working on improved version of BoxDroid 2013 project.
I'm trying to minimize the number of servo use in my design, however try to make the mechanical work as flexible as possible.
It involved many time of redesign. One of that is below drawing modelled in blender.
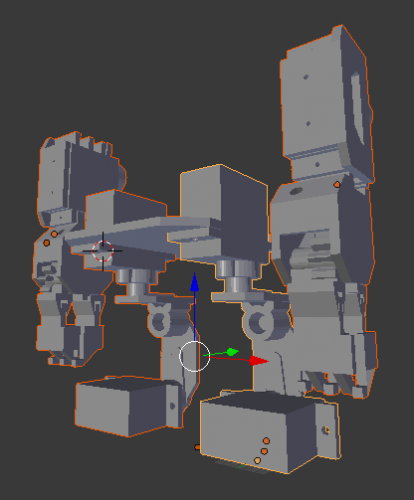
In above design, I'm creating a claw on each hand, the claw controlled using single servo though cable. However the performance and power of the claw too low. Then this design was left alone.
I'm investing on buying 3D printer Prusa I3, so I do not need to manually cut plastic anymore which consume lots of time. I think it really worth to buy 3D printer as it give me lots of freedom in mechanical design and time management. I NEVER FEEL ALIVE LIKE THIS BEFORE(INFALTB). ^,^
For this project BoxDroid V2, the mechanical already finish. I'll keep updating time to time. Now I'm in stage of designing electronic part. Enjoy!
Update 16th June 2014
I have completed the mechanical build on below image.
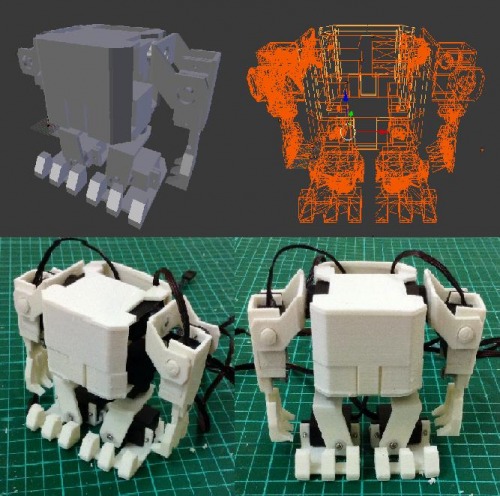
But I found out that there is too small place for my electronic and battery.(Unforgiven mistake! I cant believe this, why I'm not seriously check the space instead of thinking too much on the outlook. holy robot..).
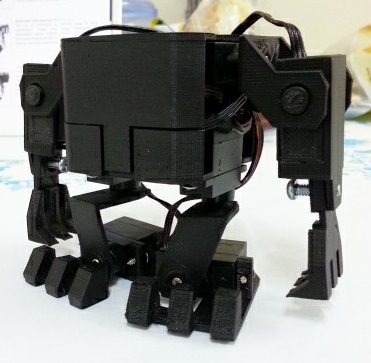
But still I paint it to black for art and picture purpose. And it still can be use as handicap droid which dont have hand, so the space for hand servo can be use by electronic part.(What a waste of time).
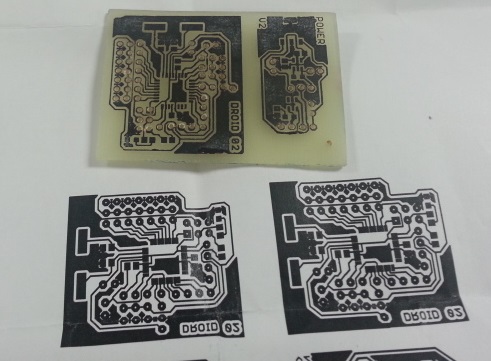
So I have re-design the body and expand it length extra 2cm. And add up some art on it.Soon will share the picture. Now in 3D printing process. Below are images of the PCB that will be use as the organ of this tiny droid which will take over the world. one day.. still one day..
And the fingers is toooo tiny,fake finger , really??. Not really useful for grabbing and slapping a cat with love. So I might want to add 2 more servo as a claw for each hand. Which make this tiny droid consume 10 servo. I'm using Atmega328 as the core to control everything. With additional external eeprom to save all the moving frame.
Navigate around, have fight, avoid obstacle and entertain peoples