


BOTtle
BOTtle is a robot like many others but with a particularity, the wheels are made of plastic bottles as you can see in this video --------------------------------->
------------------------------------------------ 2011.04.10 ------------------------------------------------
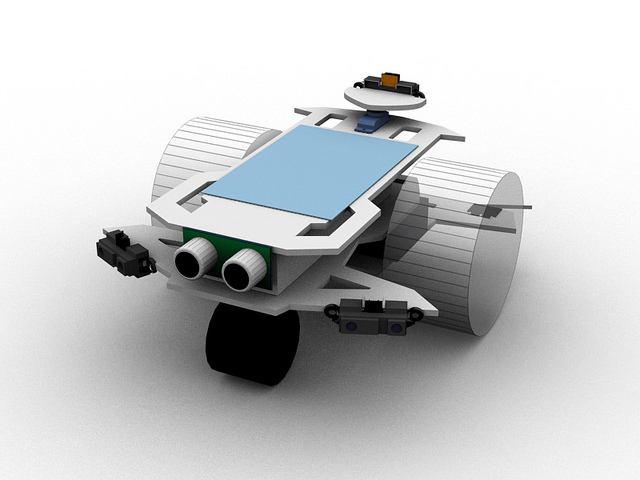
I didn’t feel so happy with the preview minimalistic chassis design so I felt the need to add some complexity to it. And because I am a 3D lover and because I have some spare time I decided to do what I never use to do: “think before act”. Oh, and the other thing that makes me want to do this is the fact that we have a CNC machine at Artica’s office. So althouth I love to build robots without thinking to much on how is it going to be, when there is a cutting machine evolved there is always the need of planning and design wich is a lot of fun as well!
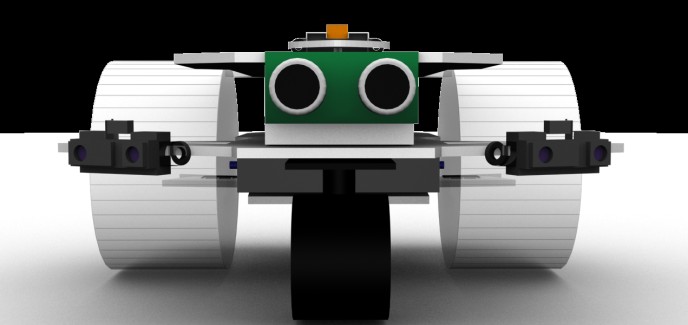
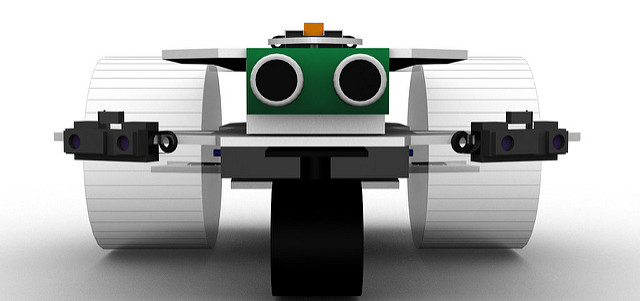
This creature will be able to go in both directions, and for each direction it will have a diferent sensorial setup. On one front there will be an infra-red distance sensor mounted on a servo and two touch sensors to detect colisions. On the other front there will be a sonar distance sensor between two low-range infra-red sensors. This setup will need to use different programming methods for movement and for sensorial perception and will be fun to program.
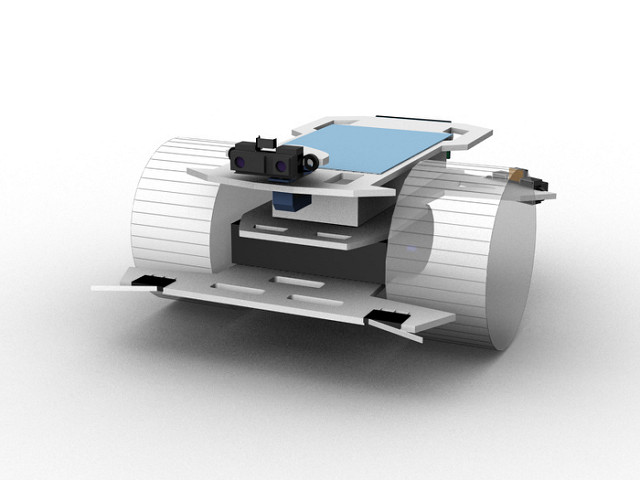
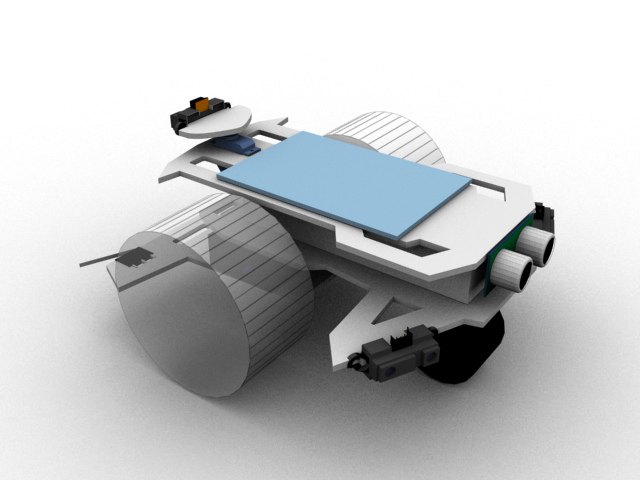
The design is ready, now let the machine do its job.
------------------------------------------------ 2011.03.31 ------------------------------------------------
The components I will be using:
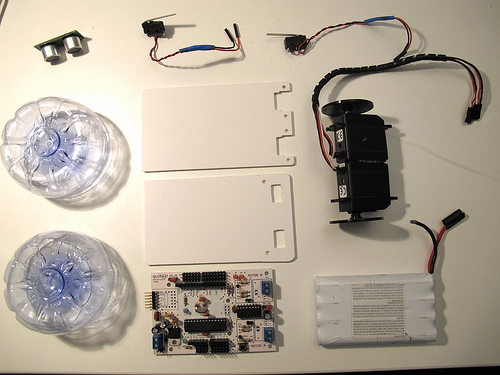
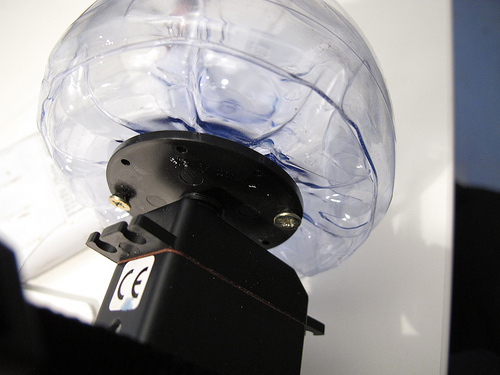
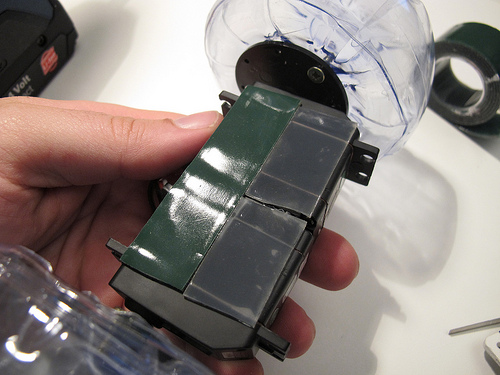
The servos are already attached to one another with double side-tape, I will show you how to attach the wheels to the servo horns

Start by adding wood self-tapping screws to the servo horn just a little in a way they won’t fall
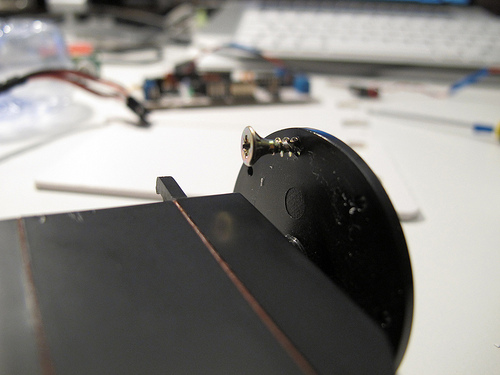
Repeat this process 4 times
Open small holes in the exact place where the screws will be tight. I used a soldering iron.

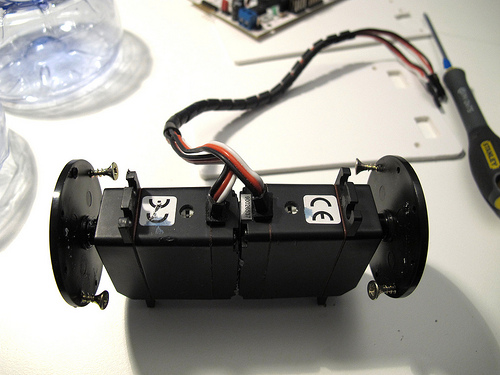
Tight both screws to the wheels

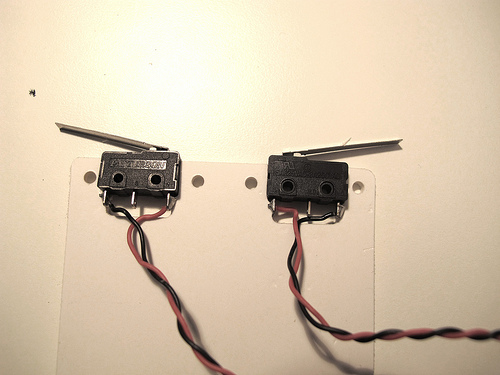
Now I am placing the bumpers on the front of the bot on a PVC sheet (in this post you can see what I have done for a Sharp sensor)
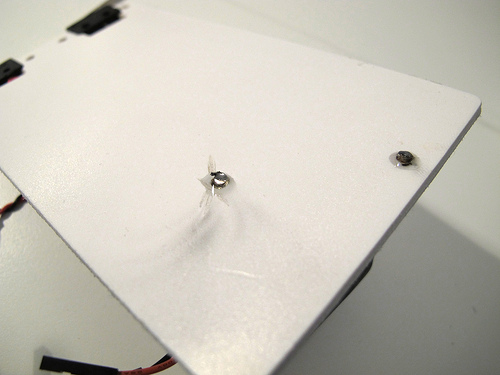
And now the caster wheel, those screws tips are going to be cutted out
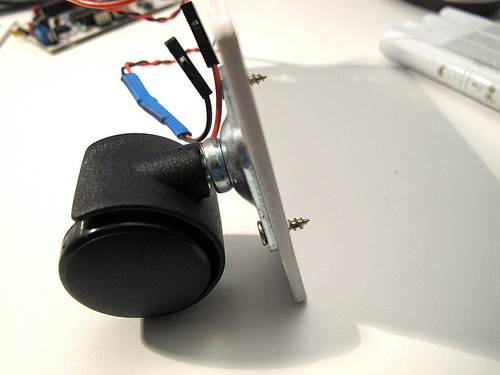
The screw tips are gone and added a bit of super glue because the PVC melted when cutting the screws
To attach the pvc base to the servos I am using double side rubber tape
And this is what I have done so far, more will be added soon (I hope)
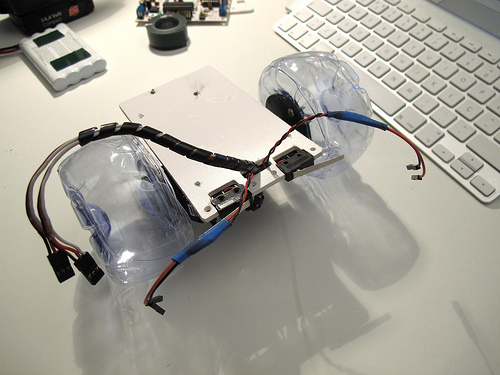

uses wheels made from plastic bottles
- Actuators / output devices: continuos rotation servo motors
- Control method: motoruino
- CPU: motoruino
- Power source: 7, 2
- Programming language: Arduino
- Sensors / input devices: sonar, Bumpers
- Target environment: indoor, outdoor