


Boe-Bot Robot with XBee and Mini Wireless Camera
Hello all,
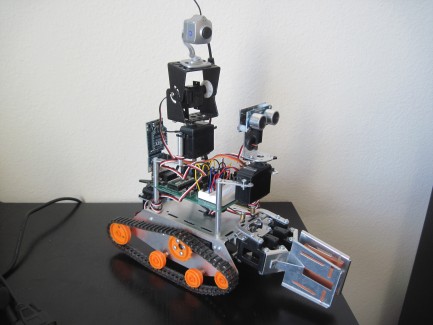
This is my Boe-Bot spy version using Basic Stamp 2 controlled by Desktop Software.
I used Delphi 7 IDE to create a user interface program to control the robot movements sending commands like move forward, backwards, turn right and left and others.
The communication between PC and Robot is made by 2.4GHz XBee module. These modules allow a very reliable and simple communication between microcontrollers, computers, systems, anything with a serial port.
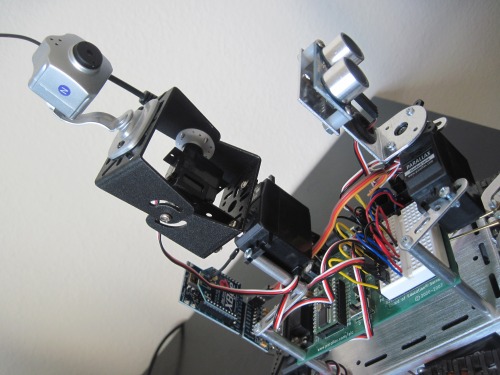
One of the big features on this robot is the 900 Mhz Mini Wireless Color Camera with Microphone, adapted at the top of a Pan/Tilt bracket with a small and large servo motor allowing to move right/left and Up/Down.Another good feature on this robot is the Gripper that allow pick-up and carry small objetcs and the Tank Tread instead of regular wheels.
Wireless info :
2.4 GHZ XBee 802.15.4 = + - 300 ft (range)
900 MHZ Mini Wireless Camera = + - 150 ft (range)
PS.The Camera must have a dedicated 9 volt battery and can not be on the same frequency of the XBee module, in my case 2.4Ghz. After having gone through this problem, I got the 900 Mhz camera and them works great.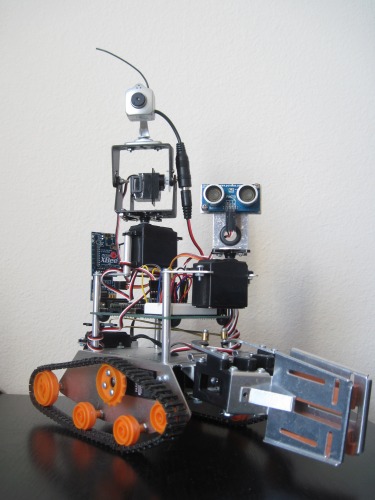

Controls the robot using a desktop software
- Actuators / output devices: 5 servos, Gripper, Tank Tread, Mini Wireless Camera
- Control method: Xbee Wireless remote control
- CPU: Basic Stamp 2
- Operating system: Windows, Desktop software
- Power source: 6 volt for the Boe-Bot, 9 volt for the Camera
- Programming language: PBasic 2
- Sensors / input devices: Ping))) Ultra Sound
- Target environment: indoor, outdoor