


BODEBot - Basic Object Detection (and avoidance) Robot
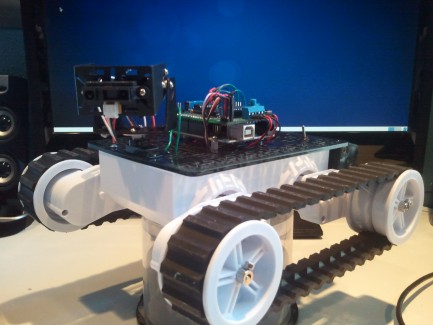
Well...this is my first attempt at building a robot. Right now it does basic object avoidance and drives around...woohoo! I'm going to continue to tweak the code to refine his object avoidance. The next thing I'm going to do for him is build a remote control that will have an LCD display and dual thumb sticks (one for driving, the other to control the head).
Info:
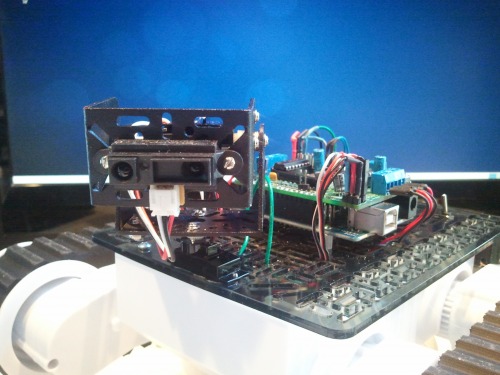
Arduino Uno
Adafruit Motor Shield
Rover 5 Platform
Sharp Infared Proximity Sensor - Sharp GP2D120XJ00F
SparkFun pan/tilt bracket
Drives around using feedback from the Sharp IR sensor to avoid objects
- Actuators / output devices: Rover 5 Motors + Encoders
- Control method: autonomous
- CPU: Arduino Uno (atmega328)
- Operating system: Arduino C++
- Power source: 12v 8xAA battery pack
- Programming language: Arduino
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoor