



Blue Dome in progress...
Well, I'm restoring an old robot, because I'm now able to use Basic Stamps. This robot is a Parallax & DeAgostini projects which came out from newsagent's, so file by file, component by component I've done this robot when I was 7. OMG !!! I was a bit distructive (I opened a servo to know how it works lol) BUT NOW I KNOW HOW TO WORK ON IT.
The hand was working bad for low batteries so now it's running with the aid of a power supply or good batteries.
The robot now can be controlled via IR SONY-Compatible remote, as you can see in this old photo.

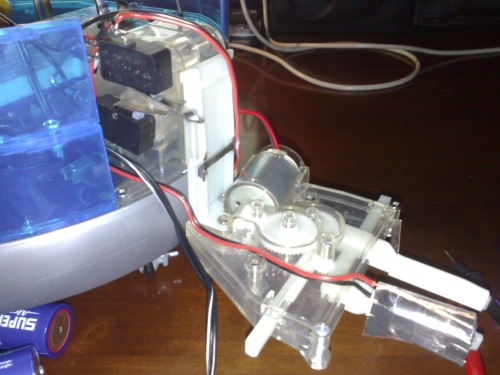
It can run in all directions using 2 Futaba Continuous servos...

...here you can see also the Main Battery holder ( 6V ) and the Auxiliary Battery holder ( 9V ), the switch for "end-opening" and finally the connectors for two IR Sensors.
The hand works up/down & open/close, of course. There are also two switches for "end-lifting" and "end-dropping", the one mentioned previously and the "patented" OddBot Pressure Sensor.
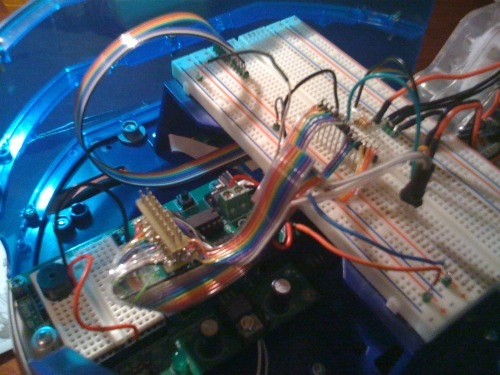
Here are visible the Auxiliary Breadboard; the 20 ways BUS from Bs2 to the BB; low visible resistors and a condensator, to Pull-Down the switches and for the RC circuit wich interface the Conductive Foam to the Bs2.
Please, if someone more professional have any tips for me, I'll be very glad to know them!
Also working in progress:
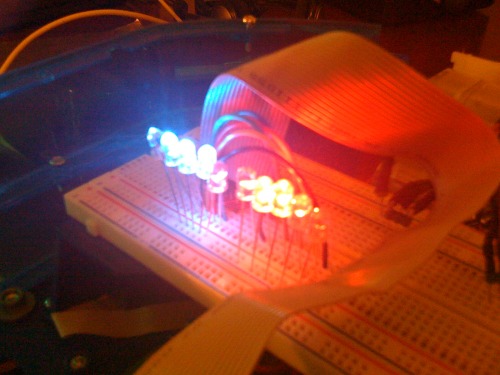
_A 10 LEDs police siren pattern.
Special Thx to:
_OddBot ( for Pressure Sensor ).
_All who said my bot is nice.
For now is ALL
See you on next update.
It manipulates objects (test movements for now).
- Actuators / output devices: 2 continious servos, 2 dc motors
- Control method: non-autonomous until a soon update
- CPU: Basic Stamp 2
- Operating system: none
- Power source: 6 V by Alcaline Batteries or Power Supply
- Programming language: pbasic 2.5
- Sensors / input devices: Autonomous
- Target environment: indoor