



Blue Bug
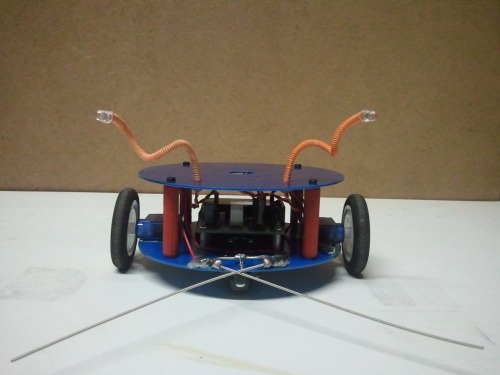
This is Blue Bug, not my first robot but the first one I am posting here... The body was made using a couple of old DVD's.
I used the herbie circuit from the book Junkbots, Bugbots and bots on wheels but made a PCB instead of free forming it. For motors I converted two servos that I already had to work as simple gear motors.
I mounted the phototransistors to make it look a bit more bug like, this has the added benefit of making them easy to adjust...
The tactile sensors in front are made from a guitar string.
Seeks light, runs away when it bumps into something.
- Actuators / output devices: 2 Servos modified to be simple gear motors
- Control method: autonomous
- CPU: none
- Operating system: none
- Power source: 9v nimh battery
- Programming language: none
- Sensors / input devices: I/R phototransistors
- Target environment: indoor on smooth surfaces