


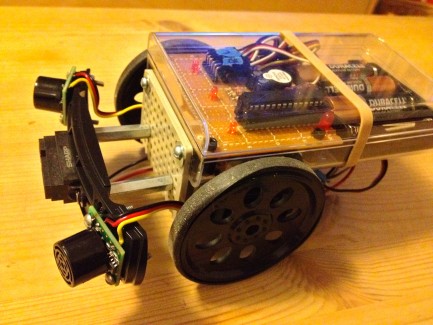
Blip 2.0
This is a small autonomous Rover. It uses spare sensors for navigation and a lot of scrap material for the body. Some code change fixed the slight right hitch you see in the video and increased turn accuracy. The robot will run into walls if given shallow enough approach. Going to use Proxdots mounted perpendicular from the front on each side to detect walls.The Picaxe 28X1 was bit of an overkill for this project as it is right now. Maybe in the future I will add light seeking or beacon location.
Navigate around via ultrasound and IR
- Actuators / output devices: 2 x Parallax (Futaba) Continuous Rotation Servo
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 3-4 AA batteries
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor, Maxbotix EZ0 sonar
- Target environment: indoor on smooth surfaces