



Bipéde FR
Bonjour, je vous présente mon premier robot qui est en cours de construction.
Etant débutant en robotique j'ai voulu commencer par un projet simple et éducatif.
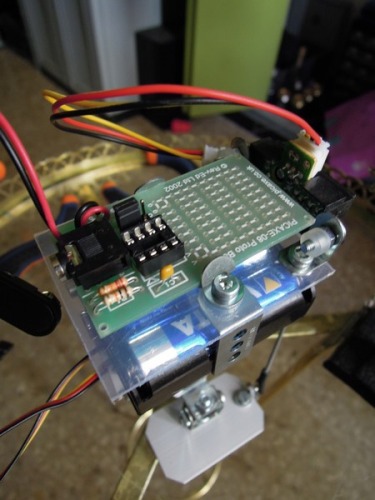
C'est un bipéde a 2 servomoteur avec capteur de distance Sharp le tout sera contrôllé par un 08M2. Il est composé de plaque d'aluminium et de piéces méccano pour une hauteur de 120mm / largeur 60 mm / longeur 60mm.
Cette semaine je commence l'éléctronique... a bientot
Hello, I present to you my first robot that is currently under construction.
As beginners in robotics I wanted to start with a simple project and educational.
It is a biped with two servo Sharp distance sensor is all controlled by a 08M2. It is made of aluminum plate and Meccano parts to a height of 120mm / width 60mm / 60mm length.
This week I start electronic ... see you soon
Matériel :
- Proto-board Picaxe 08M2
- Capteur Sharp GP2D150A
- 2 servo miniature Hitec HS-55
- support pile R6
- plaque aluminium 2mm
- plaque plexi 2mm
- piéces Meccano
- vis + écrou
- rotule
material:
• Proto-board PICAXE 08M2
• Sensor Sharp GP2D150A
• 2 miniature servo Hitec HS-55
• Support battery R6
• 2mm aluminum plate
• 2mm plexi plate
• Meccano pieces
• screw + nut
• Executive ball
• Proto-board PICAXE 08M2
• Sensor Sharp GP2D150A
• 2 miniature servo Hitec HS-55
• Support battery R6
• 2mm aluminum plate
• 2mm plexi plate
• Meccano pieces
• screw + nut
• Executive ball

- Actuators / output devices: 2 servos
- Control method: autonomous
- CPU: PICAXE 08M2
- Power source: 3 AA cells
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D150A IR sensor
- Target environment: indoor