



biped walker
This is a walking robot with two feet. At the moment it's shuffling like MC Hammer, but the saga continuous.
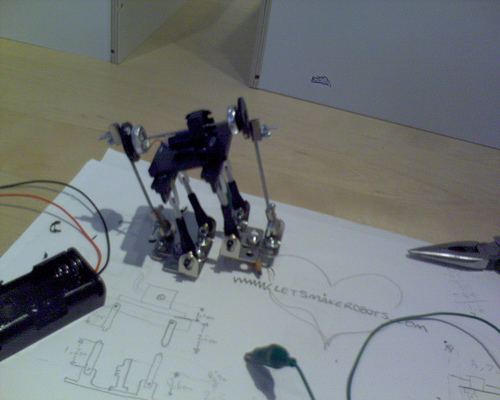
I started with the parts from an RC toy, and an idea of a one motor biped where you change the point of ballance by tilting the ancles instead of shifting the hip or torso. The original feet were prototyped using an extremely cheap Meccano™. The black joint couplings are model plane hardware, the chunky silver one is the guts of one of these).
{kind=link}

(Damn my pictures are crappy!) The outer rod transfers power from the rotating hip wheel, this pushes the foot forward/backward, and tilts the outside of the foot up/down to swing the angle of the legs, thus moving the weight left/right). The two struts on the inside (straight beneath the motor) keeps the foot stable and ensures that it only moves forward/backward, not
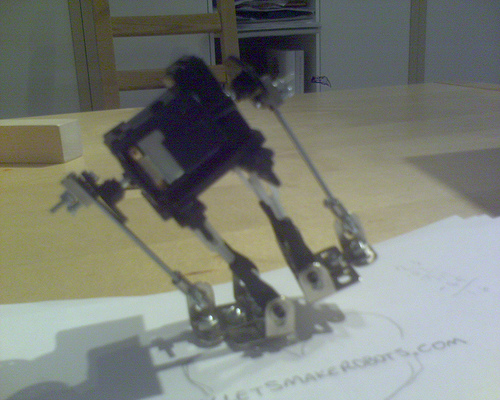
I then built a new wider base or hip platform to get som more space between the legs, and to fit better with the original length of the motor shaft.
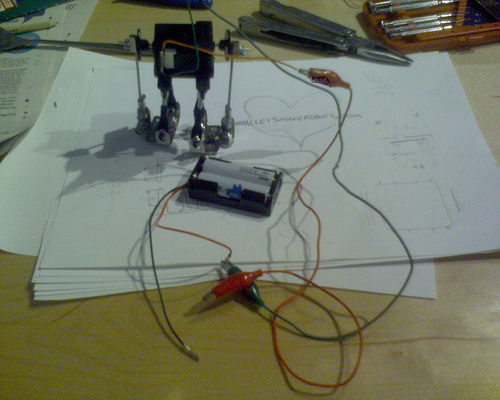
Picture is taken with a pencil under one foot to demonstrate how the centre of gravity will move because of the tilting feet. This motor however turned out to spin to fast and have to little torque, so I switched to a larger RC toy car motor that I didn’t really believe would work, but I had to pass the time somehow.. Soldering on some wires and giving v2.0 a spin was fun, but showed that this contraption needed some serious rethinking
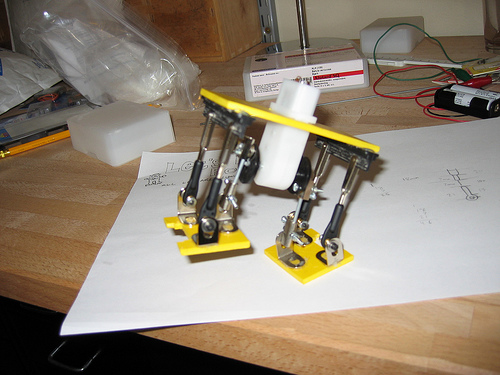
UPDATE MARCH 6. 2009
I’ve spent some time redoing the base and the feet in plastic and fitted a Solarbotics GM7 with a custom output shaft down between the legs. Oh, and the legs have been "turned" so the single power strut is now on the inside, while the two stabilizer struts are on the outside. It just fitted better with the motor sitting low. Some of the model plane plastic hinges I used have been replaced by metal ones, but there’s still some black IKEA parts in the hip (Yeay Scandinavia).
tries to walk forward
- Actuators / output devices: Solarbotics GM7
- Power source: 2-4 AA batteries
- Target environment: indoor, flat surface, Tabletop