


biped Trashbot 5, learning Center of Gravity for longer strides
I'm working on improving the stride length of the original BoB logic (four servo walk). I decided to add two hip servos and I hope I can get away without adding additional ankle servos...
This is how Trashbot 4 transformed into Trashbot 5:
https://www.youtube.com/watch?v=0fUss5tq3L8
And along the way, I learned a couple of things:
How wide should the feed be?
https://www.youtube.com/watch?v=sZ8Bz_ioReo
Successfull yes, but full body has different Center of Gravity and should help.
https://www.youtube.com/watch?v=wBxXjNAE0II
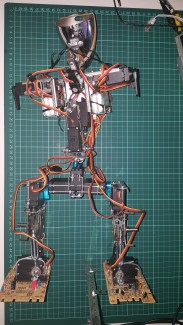
So the full Trashbot 5 assembled:
https://www.youtube.com/watch?v=-1FdpTjBK_g
And finally experimenting with servo settings and postures to do his first kick!
https://www.youtube.com/watch?v=IWzHhI1aTuE
For more info, here are the two relevant blog entries:
hardware: http://assadollahi.de/working-on-more-degrees-of-freedom-in-the-legs-of-trashbot/
movements: http://assadollahi.de/trashbot-5-new-hips-first-movements/