



Big Trak, my first robot
I used to have one of these when I was a kid,so when I saw one online cheap I thought I would get it. When it arrived i found that it was one of the new type ones. So i decided to rip it apart :)
So far I have ripped out all the insides and fitted a platform inside to fit everything to. The only things in there I am keeping are the motors and gears and the speaker. LED is going to be changed for a laser.
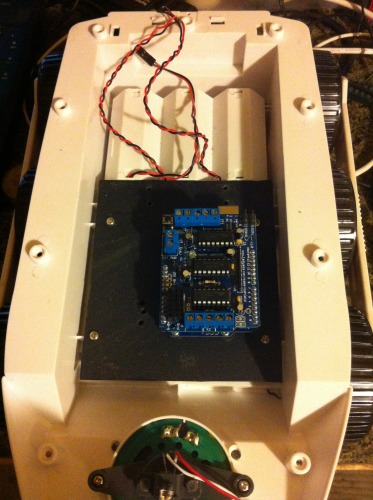
It will be run off an Arduino Uno paired with a l293d motor drive shield. For now!! As it has ony two motors I might change the motor shield for a 2 motor one later.
This is as far as I have got but planned for it are a camera on a tilt and turn, that I might put where the ultraonic is now, plus one more camera, more ultrasonic sensors, gyroscope, gps and solar panels for charging and anything else I can think of. If I can get one cheap enough I am thinking of a robot arm fixed to where the ultrasonic is.
Only need to get it running now!!!
02/01/22014
I have fitted a tilt and turn mounting on the top. the ultrasonic will fit on there.

08/01/213
uploaded some code and it now drives around using the ultrasonic. when it detects an object at a preset distance the servo pans left and right, it then travels in whatever direction is clear.
need to fine tune it now and make it more sensitive.
Drives around avoiding obstacles with utrasonic
- CPU: arduino uno
- Sensors / input devices: HC-SR04 ultrasonic sensor