



BERNT
"My First Robot" - BERNT
EDIT: 2009-02-02 - BERNT IS ALIVE!
New video added, I know the performance sucks and all that...but i just wanted to show it. =o)
EDIT: 2009-01-11 - FIRST POST
Part one of the "How to Build Your First Robot"-code is implemented with some minor changes in order to suite the somewhat different components htat i've used.
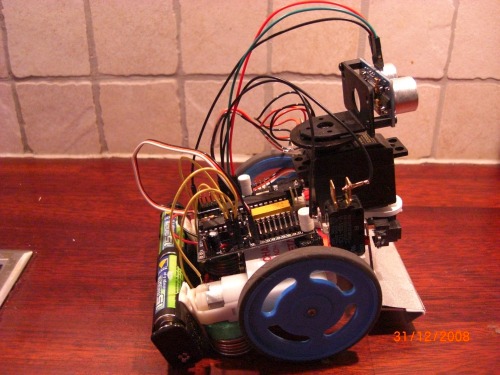
The difference from the tutorial is that i've used a Parallax PING))) sensor and added two "bumper"-switches that actives an interrupt in the code.
The IR-Sensor isn't activated just yet btw.
This lil quite works as a charm.. =o)
It really really really annoys my poor dog as well.
EDIT: 2009-01-15 - PARALLAX PING))) Sensor
Some of you have emailed me and asked how I got the PING))) sensor to work with the 28X1 board. All of you should take a look at the following excellent walkthrough/tip: https://www.robotshop.com/letsmakerobots/node/1276 made by Vince v2.0
The main thing is to make sure that the sensor is supplied with 5V! ( I made that mistake)
The walkthrough discusses most of the problems that may occurs while dealing with this sensor.
The subroutine in BERNT dealing with the PING))) sensor looks like this:
get_distance:
high portc 0
pauseus 5
let dirsc = %00000000
pulsin 0,1, w0
return
EDIT: 2009-01-29 - New Navigation Code
BERNT is now a little more "smooth" in his navigation and I've decided to add a video of his performance. =o)
Next part is to make him follow a wall using his Sharp IR Sensor. Video will of course be added.
Beer is great.
EDIT: 2009-01-30 - BERNT IS DEAD
Bernt the way we know him is dead! A new-born BERNT will be published soon though, this time with some more sensors, new code and some cool accessories.
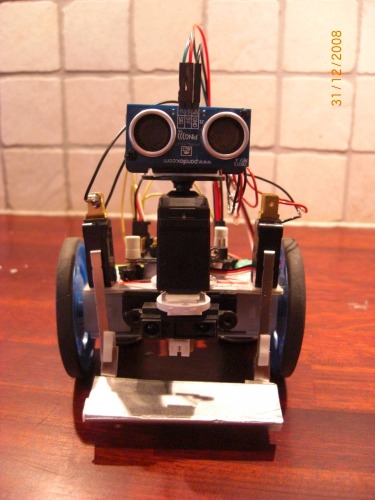
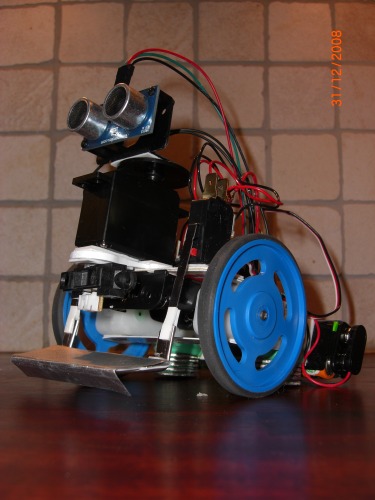

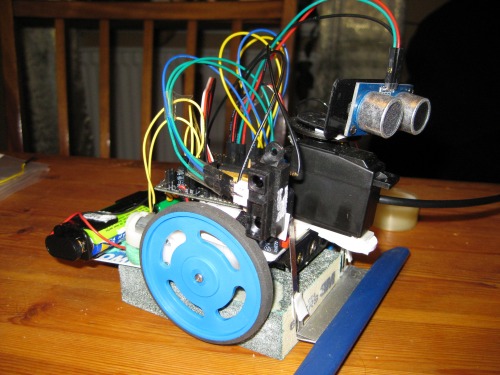
Navigates around using ultrasound and with a bumper to detect low-level obstacles.
- Actuators / output devices: 2 motors, 1 Servo
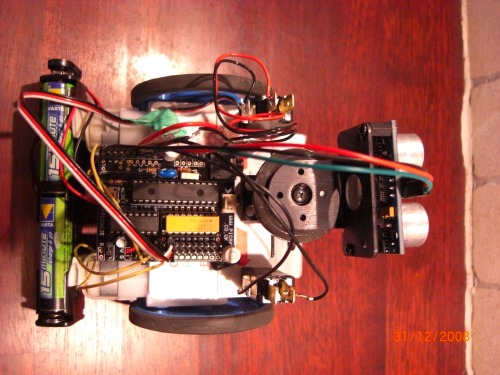
- CPU: Picaxe 28x1
- Power source: 4 AA batteries
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR, Parallax Ping))), 2 Bumper switches
- Target environment: indoor