



Beginners Robotic Arm
This is my first solo project from scratch. My only robot experience is with the starter robot on this site. I do have some programming experience though. The robot is mostly made out of Styrene. The first joint has some polymorph on it to secure it better. I have gotten the arm built and all the servos on. I need to connect the wiring and mount the picaxe and batteries still.I plan on using 3 AA cells, hopefully it will be enough. The design isn't so good in the sense that I am just doing it without any type of plans or research. So I can already tell the lengths of each segment aren't exactly optimal.
The good thing about the design is that I made it entirely modular. If I ever need to change anything, it is very easy to take apart.
check it out:
Full Arm:

This is The Base, It comes apart like the rest of it, but it requires the removal of a screw which I did not do for these pics:
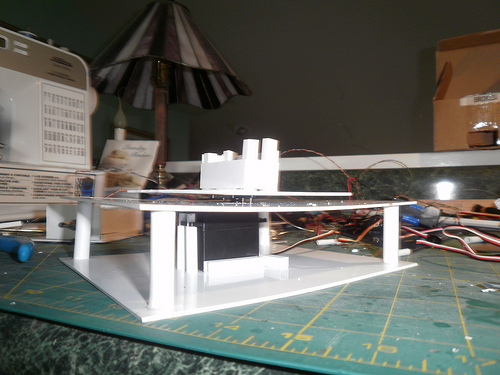
Here is the first module added on which includes the base joint and half the first segment:
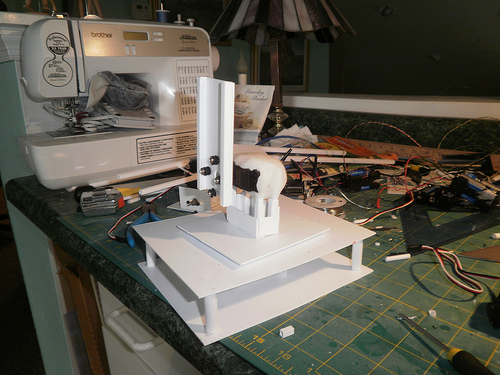
Next Module is the Second half of the first section and the second joint:

Next is the last arm extension, which may be a little too long, I may shorten it:

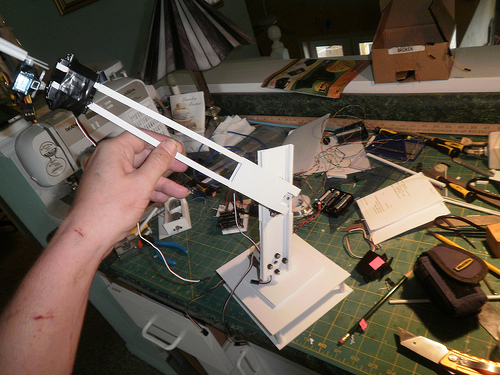
The Last Module that snaps on is the Wrist/Grabber section, bare in mind that the last section is secured with electrical tape and is a work in progress. I just don't have a good idea for the claw yet, so this is temporary solution :)
Okay and a final picture, since the wiring is not done or anything, I have to extend the arm manuall by hand. I am glad I made the design modular, because I am sure I am going to have to tweak the hell out of this arm to get it to function at least sub optimally:
And that's my arm. I'm happy with it so far.
Rotates, Moves 4 Axis, Grabs(sort of)
- Actuators / output devices: 2 microservos, 4 Servos (Futaba S3001(1), Futaba S3003(3)
- Control method: Controlled by programming, working on a way to control with sharp IR
- CPU: Picaxe 20X1
- Power source: 3AA cells for logic circuits
- Programming language: C# / Picaxe Basic
- Sensors / input devices: Sharp IR
- Target environment: indoors