


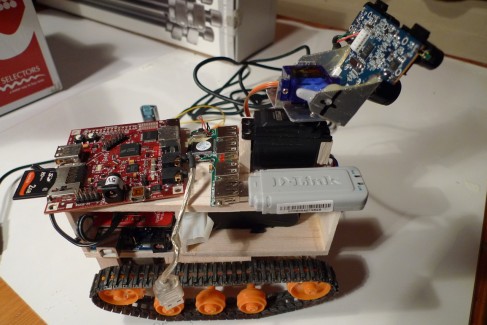
Beagleboard - Arduino hybrid robot
- image processing
- artificial intelligence
- speech synthesis
- voice recognition
- internet connectivity
- motor / servo control
- sensor input & output
- battery monitoring
The two microcontrollers will be connected by USB, along with a USB webcam mounted on a servo pan/tilt mechanism, and a USB wifi dongle for internet connectivity. Basic tank treads will provide movement, possible being replaced by servo-based legs for a humanoid or dog form.
It's a work-in-progress at the moment. I've got the tracked base running with the Arduino using the Ardumoto controller, and I've got a webcam and USB wifi working with the Beagleboard. More details on my build log at: http://mechomaniac.com/robots
Update (2009-10-04)
I've now got the Beagleboard talking to the Arduino by serial, so that it can control the motors and servos. I've started to experiment with some computer vision, identifying and tracking a pink ball from an Aibo. See http://mechomaniac.com/node/72 for details.
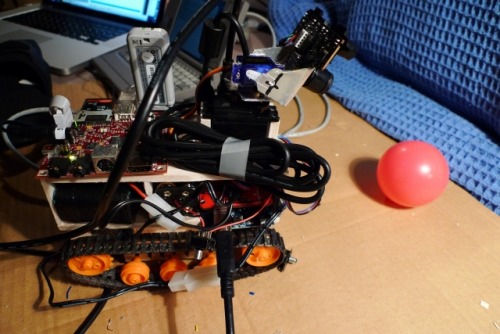
There pictures form the webcam seem to be delayed by about 2 seconds which makes the tracking a bit odd, and only the pan servo is connected (I need to extend the cable for the tilt servo), but the Beagleboard does seem to have enough performance for image processing.
Powerful union of a Beagleboard and Arduino to navigate using computer vision from a webcam
- Actuators / output devices: 2 servos, speaker, Tamiya dual gearbox
- Control method: autonomous, WiFi
- CPU: Arduino, Beagleboard
- Operating system: Linux
- Programming language: C++, C, Python
- Sensors / input devices: Sharp IR, USB webcam
- Target environment: indoor