


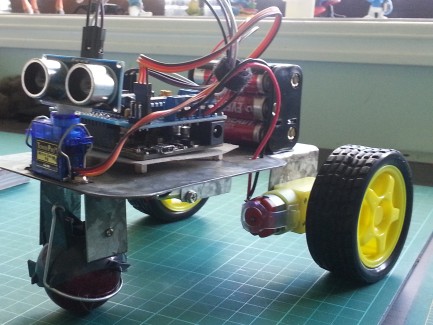
Basic obstacle avoiding robot
I came across the instructions to build this in a magazine and found it a great entry into robotics. It is working well but I'm still fine-tuning the programming. I would like to add to this project over time, to eventually include voice control, speech and other nice things. For the heavier software I have a Raspberry Pi that I want to incorporate into the robot. This is my first venture into robotics and i am having a ball!
Update (21/11/2013): I have finally managed to shoot some video of P1. He is working nicely now and although there are still a few minor hickups (can't see what's below his nose, occassionally get's stuck), I consider this project completed. I had heaps of fun and went from 'not-a clue' to 'have-some-idea-what"s-going-on'. Now, I'm working on my Pi-Bot, complete with camera, LCD display and more - he is going to be a quite sophisticated fellow.
uses ultrasound to navigate around obstacles
- Actuators / output devices: 1:120 geared DC motors, S090 servo motor
- Control method: autonomous
- CPU: Arduino (freetronics Eleven)
- Power source: 6 x AA cells
- Sensors / input devices: SR04 ultrasonic sensor
- Target environment: test, learning