


B166ER
This is a quick and dirty update, mostly copied from my website http://www.obscurereality.org/?page_id=19
I'm redoing it from the ground up.
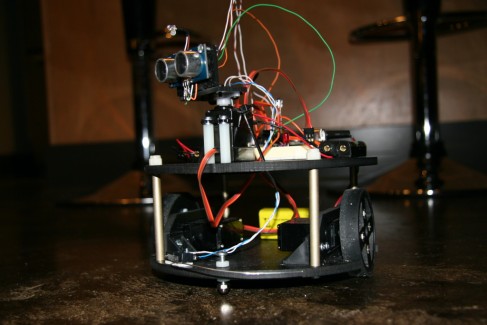
B1-66ER is my first robot from scratch, and a massive learning experience. This page will document it’s progress from it’s current prototype state to completion.
Coming up with what I want it to do has been a challenge itself. The very basics are a no-brainer, obstacle avoidance and interaction. But what interaction? I’ve got a few ideas.. maybe a ‘pet’ of sorts. I’ll improve this page when I’ve got a better grasp on everything.
Now that it’s moving on it’s own, I’ll be adding more modes to it. Sentry and Light Seeking come to mind. Not sure what else though.
…
Goals:
- Obstacle avoidance
- Personal interaction of some kind
- Self sufficient via solar power/charging station (solar will be easier I think)
TODO:
- Add bump sensors
- Give it the ability to choose which direction is best based on it’s surroundings
- Build a Shield to get rid of the breadboard once prototyping is done
- Headlights – Turn on/off depending on ambient light (Almost done)
- Ability to ‘look’ around. At the moment the Ping))) is stationary. Maybe I’ll add some IR range finders
- Clean up the sketch, and comment the crap out of it.
- Think of more advanced things for it to do.
- Give it modes. Will be chosen via toggle switches. Roving mode done.
Parts(so far):
- Ping))) Ultrasonic sensor from parallax
- Scooterbot II base from Budgetrobotics
- Arduino
- Small breadboard
- 2 AAA battery holders
Navigate around via ultrasound
- Control method: autonomously controlled by onboard microcontroller
- CPU: ATMega128
- Power source: 4x AA, 1x 9v
- Sensors / input devices: Ping))) Ultrasonic
- Target environment: indoors