



B.I.L. (Because I'm Lazy)
To start, I'd like to say this is my first robot, but, since I had electronic- experience, and so many people have done the SHR, and I had a good idea, B.I.L. was born! Also, I'm sorry for not posting my progress, got caught up in the moment i geuss :)
The plan was (is) to make a robot that can go somewhere (down the hall, across the room, across my desk, etc.) and retrieve something for me, and be controlled via my T.V. remote (actully, now I'm thinking it'd be better to have it be radio- controlled; I wont have to worry about line-of-sight and slow data transmission :D)
Not much to say, except that I had a little trouble getting the treads tight, and cannot work on the IR control, as I don't have a pull- up resistor (yet) :(
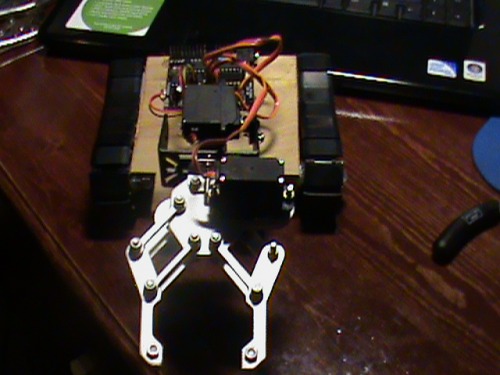
Here's some more pictures:
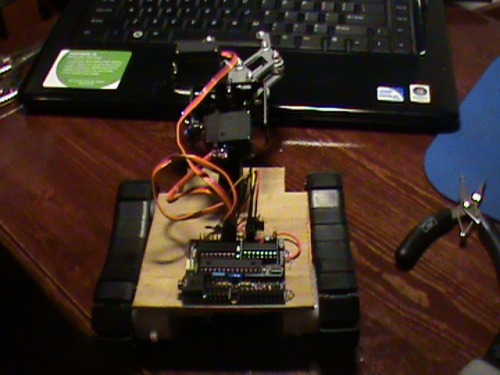
Sorry for the quality of the pictures... more updates and videos to come soon.
UPDATE:
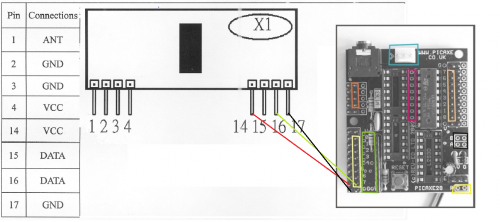
Instead of IR communication, which i couldn't get to work, I've decided to use these RF modules:
I think this will be faster and I won't have to worry about line-of-sight.
I'm pretty sure this would be how to connect the reciever to my 28x board:
I'm not going to post a picture for my 20x2 picaxe chip-setup, becuase it is so simple.. data to input 6, Vcc to +3v, Ground to Ground.
P.S. I think that I wouldn't need an antenna for either modules, but please correct me if I'm wrong.
- Actuators / output devices: 2 geared motors, 3 servos
- Control method: (Will be) Infra Red controlled via my T.V. Remote, possibly radio0 controlled
- CPU: Picaxe 28x1
- Power source: 3 x AAA
- Programming language: Picaxe basic
- Target environment: indoors