



B-Bot - Mark 3.0
This is my B-bot project, It's a personal things gripping butler robot.
Update 02-09-13
A quick update on my robot.

Installed the turning servo.

Control box placed and hooked up.
Also got the first demo code for the turning, video on the side.
Update 19-08-13
After a half year of being busy, i could finally get back working on my robot.
A brand new base design after a day a work.
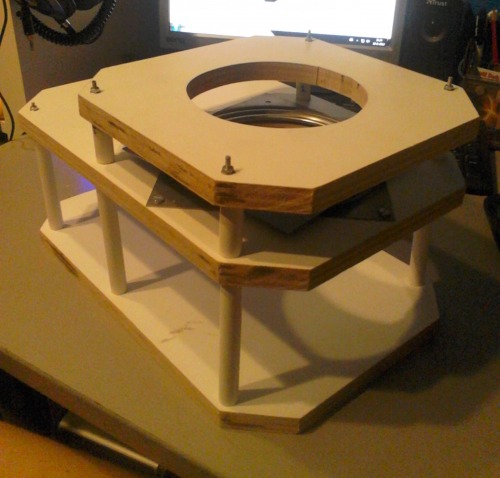
Basic structure of the base done.
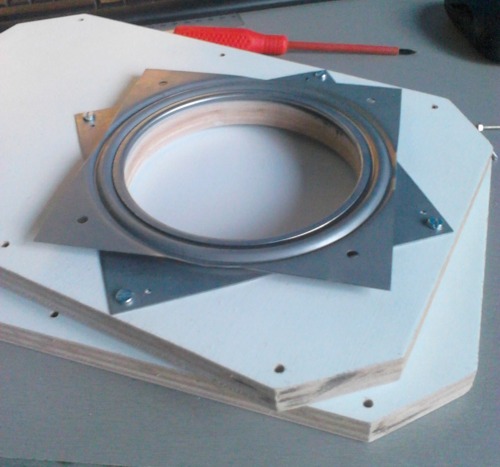
I got a lazy susan for the turning, which is now a lot better.
Update 03-01-2013
At first a happy new year to everyone, and let's have a year full of robots.
Now my robot, got the robot almost complete in the building stage just have to do some small things.
Here are some pics.

Gripper mounted to the robot.
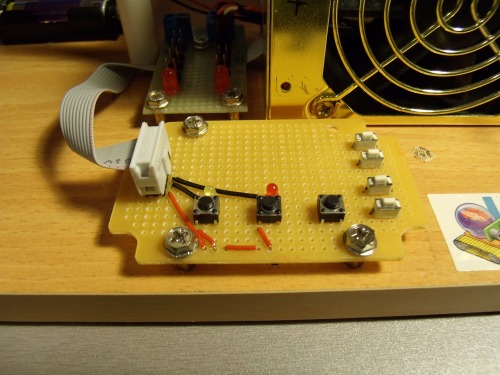
Control pcb made but not working because it's not finished yet.

Robot in it's current state.
Update 28-11-2012
Got a new picaxe board (the other one was not working anymore).
Second arm working.
http://www.youtube.com/watch?v=dCWk-txGldM&feature=youtu.be
Update 29-10-2012
Got the first movement out my robot, and it doing what it's suposed to be.
Update 18-09-2012;

Removed the Up/Down system because the top side of the robot slipped true the gears.
Put on the other arm, and made a other "stand" because the robot's arms don't go Up/Down anymore.

Prototype of the controller of the robot.
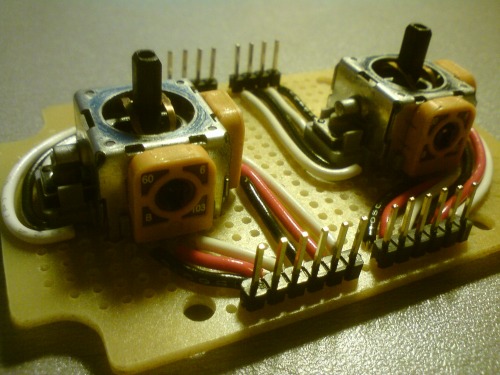
All pins brought out to male headers, made it so i can used it again for another robot in the future.
Update 28-8-2012:

One arm in the robot, raised the Up/Down system so there's more rome for the arms.
Still need to create a new "back" for the robot so there's also more room for the grippers.

B-bot standing in his high position,

B-bot standing in his lowest position,

Turn gears and Up/Down gears,

Some lego parts in the Up/Down system,

Old power supply case as Control box,
My personal butler,