


B.bot ( Eurobot cup )
This robot is destined to the robotic cup Eurobot ( http://www.eurobot.org/ ). It's a great amateur robotics contest composed essentially of students teams or independents clubs. The robot must be totally autonomous. He have 1'30'' to find and move a maximum of objects in a goal.
B.bot is composed of two friends who made all the conception and the realization of this project. And we have also the support of a mechanical teacher who help us to build the structure
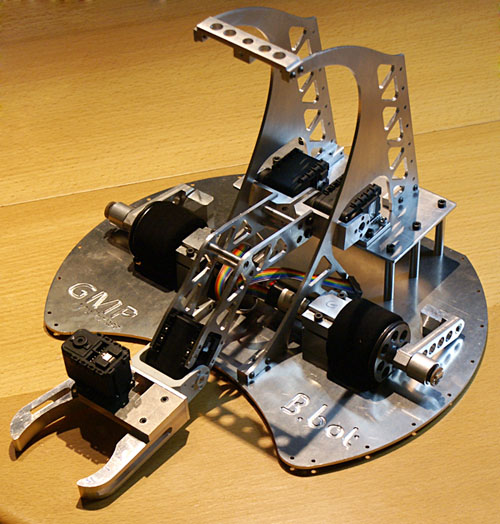
The robot is composed of different parts :
-> A wheel base with two brushless DC motors associated with two independents wheels with high precision encoders for odometry system. This give us a great precision in our movements even if the drive wheels slip.
-> An arm with two axes of freedom composed of servo-motors to bring diffrents kind of objects.
-> An LCD panel to show some information about the robots during a match.
A lot of things are still in development. We are actually redesigning all of the electronic boards as Brushless drivers or a capacitive interface for the LCD panel
We have post some information in our blog : http://www.b-bot.eu
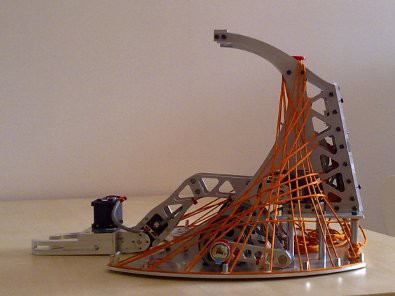
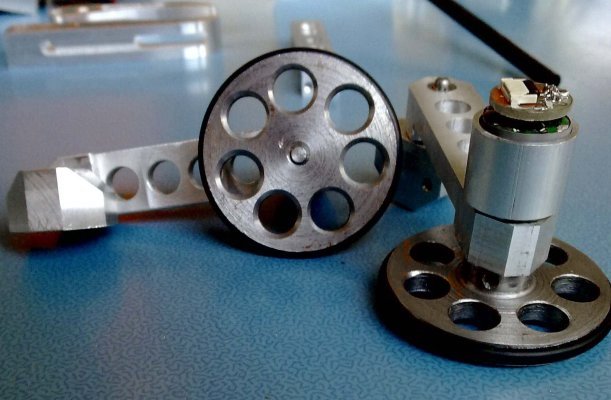
Other view of the structure :

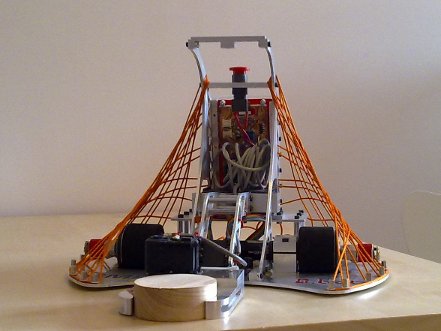
And an other one :
The arm :
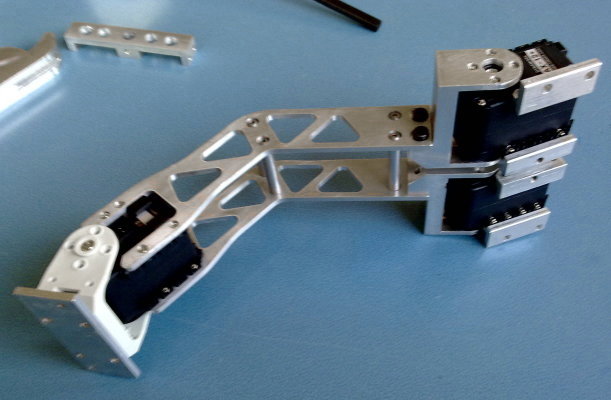
We are using digital servo-motor AX-12+ from Dynamixel. They are controlled by a common half duplex serial line. A lot of parameter can be programmed as torque, speed, position, etc... This type of actuator are a little bit expensive than analog servo motor.
We have coupling two servo to lift a largest load.
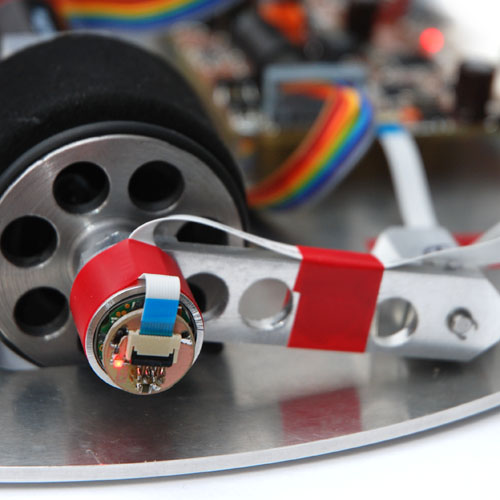
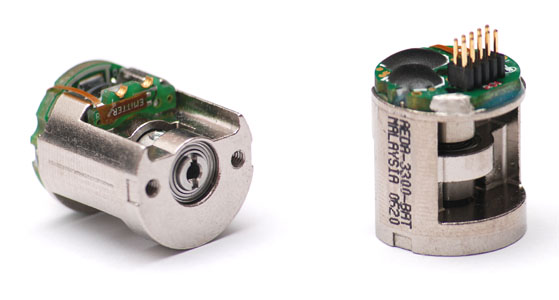
The Encoder :
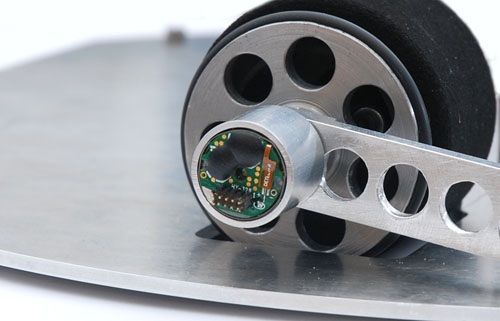
This is independent wheels with encoder. Very useful for making a good PID controller and odometry system. We have 4096 step in one wheel revolution.
The motor :

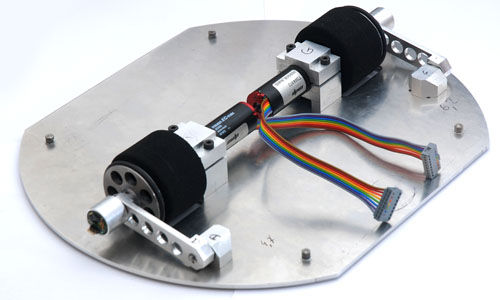
We use brushless DC motor for moving the robot on the table. It's the little challenge of the B.bot team. We wanted making our own Brushless DC controller/driver. Brushless DC motor are very dynamic and powerful, they are a smaller and cheaper than equivalent brushed motor. So we buy in the first time motors and build the robot around the.
Here we are using maxon EC-max 22 motor : 22W 24V with a ceramic planetary gearbox who divide by 20 (if my memory is good)
The LCD panel

This is our LCD panel controlled by a dsPic. You can saw a small video here : http://vimeo.com/3213133
( sorry for my bad english, if someone would correct me send me a email )
Move objects with his arm
- Actuators / output devices: Two brushless DC motor
- Control method: autonomous
- CPU: dsPic30F4011 microchip
- Power source: 24 Volts Lipo
- Programming language: C
- Target environment: indoor