



AX-12 Robot Arm
Introdution:
This is my competitor for the LMRv4 Donor Appreciation Robot challenge. Using 5 Dynamixel AX-12+ Servos and an Arduino Mega. Programming has been done through Pypose, part of the Arbotix project.
Hardware:
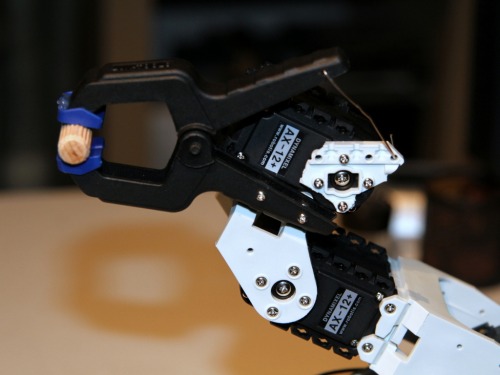
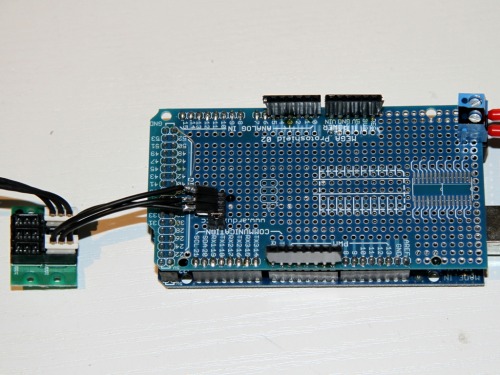
5 Dynamixel AX-12+ servos has been used to build the robot arm and gripper. The arm has 4DoF and the gripper 1DoF. An Arduino Mega board has been used to control the servos. Only UART1 (RX1,TX1) are needed to control all servos. No external hardware is needed to attach the servos. The gripper is made by a claw from the local home depot. The idea has been lent from the Make project Teleclaw.
Software:
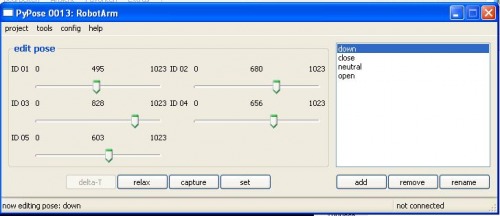
There is no real programming needed. The Pypose sketch from the Arbotix project has been used without any modification. You can create poses very easy using the Pypose editor. Also sequences (running different poses time controlled) can be created with a few mouse clicks.
Update 2012-04-30:
This is my actual setup. Nothing has changed on the robot arm. A bowl with 140 wooden dowels has been used for a sample drawing. Each dowel will get a unique number from 1..140 or whatever the actual number of contributors is. No detection of invalid drawing so far (if the gripper gets none or more than one dowel). The robot arm is doing some kind of stirring now, before the drawing. But it doesn't work well, the bowl is moving more than the dowels. The 2nd video shows a sample drawing 5 out of 140. It takes 7 attempts to complete. 2 failed attempts.

Sample numbering of a wooden dowel.

Update 2012-05-04:
The winners of the LMRv4 donation marathon has been drawn. I couldn't show the drawing live at the RobotParty, but a prerecorded video has been showed during the hangout. Spacial thanks to Andrew 'inoblegnome', Erin 'RobotGrrl', Nils 'NilsB' for their efforts and all others that gave me great tips to complete this challenge.
Draw numbers of the winners of the LMR Donation
- Actuators / output devices: 5 Dynamixel Servos
- Control method: remote
- CPU: ATmega1280
- Operating system: none
- Power source: Power supply
- Programming language: C++/Python
- Sensors / input devices: none
- Target environment: indoor on smooth surfaces