


AVR Line Follower
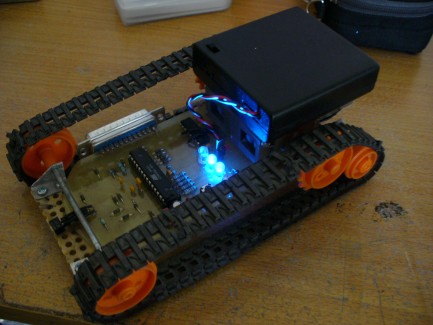
I built this robot for a University course on C Programming, and later (after my assessment, although before the end of the course) added the tank tracks to replace the original Tamiya truck tyres. As such, all parts were supplied by the university, and as my course fees were paid by my school there was no charge to me. All extra parts were found lying round my garage, including the tracks and extra mounting hardware.
The course required, for top marks, that the robot must be able to:
- follow a black line
- stop, for ten seconds or until a switch was pushed, whenever a grey line was crossed
- be able to cross a white or black line without deviating
- be able to stop when an object is detected in front of it, and continue when it was removed
- stop when the end of a line was detected, and after five seconds turn around and continue
Before the modifications, it met all of these requirements, although due to it's decreased speed with the tracks it now has trouble with crossing some black lines as it no longer can just shoot over them. It still meets all the other requirements, even though, with an increased wheelbase, it's steering has been dramatically reduced.
Simple Line follower, with additional ability to stop when objects are detected in front of it and turn around when the end of a line is detected.
- Actuators / output devices: Tamiya dual gearbox, Tracks
- CPU: AMTEL AVR ATMEGA8
- Power source: 6V 4xAA Batteries
- Programming language: C
- Sensors / input devices: 4x IR Optical Sensors, Touch Switch