



Autonomous Telepresence Security Rover
Autonomous Security Rover
by Arthur Gabanyi
http://modern-robotics.com/
The Rover will be able to navigate through a known environment, with the main purpose to make sure that no one is on the premises. In case of a security breach (witch the Rover will be able to detect via the two PIR sensors) it will send a text notification to the cell phone of the owner. The Rover can also be controlled over the Web or with a Remote Control Unit (Case with a 10" screen). The Remote will get a separate post since it is quite complicated.
When I got the time (in a few days) I will describe my Project in more detail.
In case you are interested, there is a lot of Information in the Video.
There will be many videos to follow. :)
If you have any thoughts on this project please tell me in the Comments down below.
Or if you have any questions contact me:
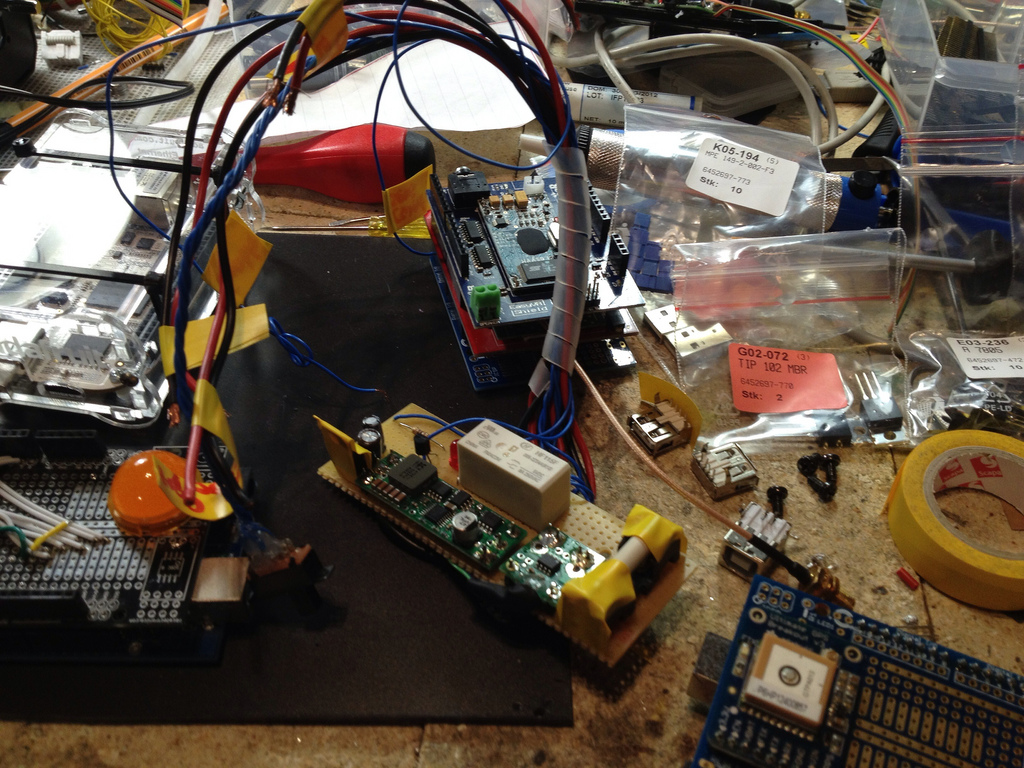
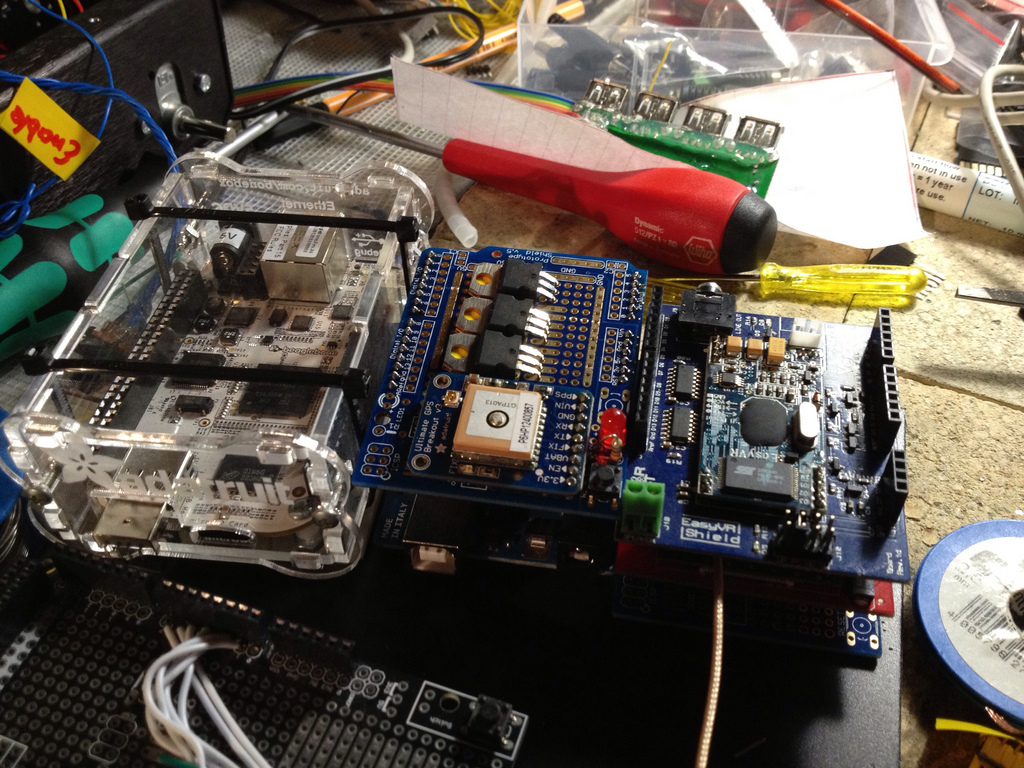
In the meantime some pictures of the Working-Progress:
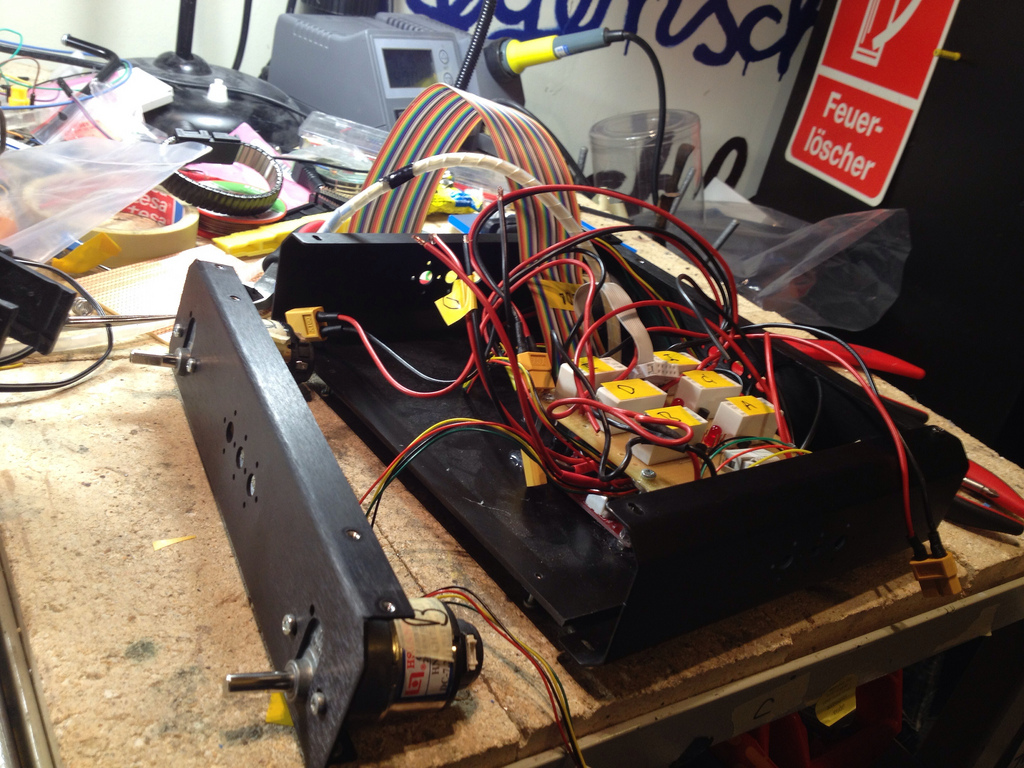
The Power Board taking care of the 5V supply (capable of 7.5A):
Bottom part of the Rover with the three Batteries the four motors the Rover 5 DriverBoard and the 'BrakeBoard':

Components located in the Top Part with the CPU. (GPS, Voice Recognition, BeagleBone, GSM-Shield, Power Regulation):

A cruel drawing :)
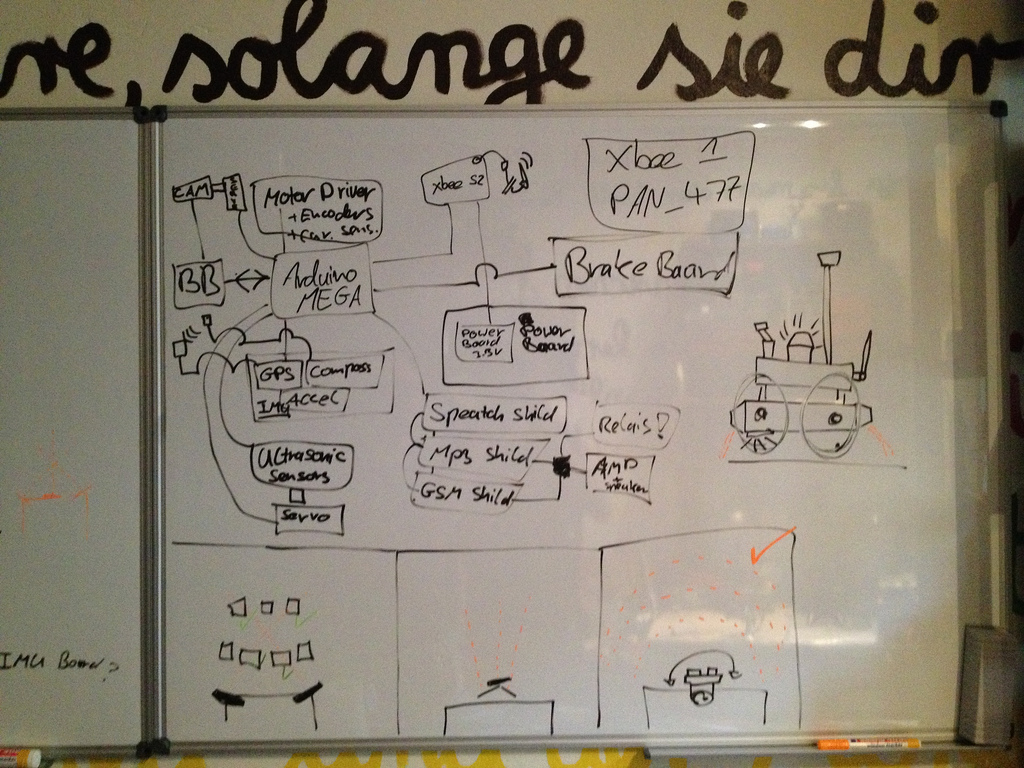
cruel drawing :)
There is more content coming soon!
If you have any questions contact me:
If you have any thoughts on this project please tell me in the Comments down below.
A very capable Robot, that can be remote controlled or rely on numerous sensors to be autonomous.
- Actuators / output devices: 4x 7.2VDC 291RPM 54.31oz-in GHM-03
- Control method: autonomous, Webpage over Wi-Fi, Xbee Pro S2 2.4GHz 1.6km
- CPU: Arduino Mega 2560, BeagleBone (handling Webcams and control over Webpage)
- Operating system: Ubuntu (Linux) (Image from OpenROV)
- Power source: 2x 7.4V 8000mAh 2S Li-Poly 30C (for the 4 motors), 7.4V 4000mAh 2S Li-Poly 20C (over Pololu D15V70F5S3 Step-Down Voltage Regulator for 5V Logic)
- Programming language: Arduino - C/C++
- Sensors / input devices: Pololu 30A ACS715 Current Sensor, Lynxmotion Quadrature Motor Encoder, Pixy (CMUcam5), Pololu QTR-8RC (line follower), HC-SR04 ultrasonic sensor, PIR Motion Sensor, gas sensor, Ultimate GPS, Tilt Compensated Compass (LSM303)
- Target environment: indoor, outdoor