


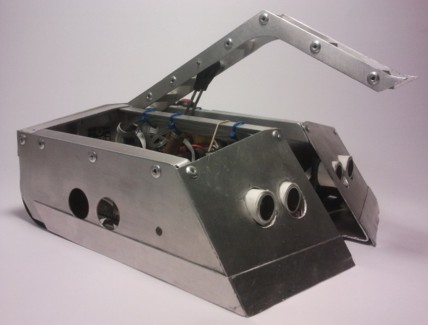
Autonomous Sumo Battle Bot with Pneumatic Flipper
This Sumo Bot was designed, built, programmed and tested over a 12 week period for one of my final year engineering classes. The aim was to design and build a lightweight fully autonomous sumo fighting robot for an in class Sumo Bot competition. The robot was required to push, lift or flip the opponent’s robot out of the arena. There were two physical restrictions which the sumo robot must abide by. The robot must weight no more than 1000g and is required to fit within a 200mm x 200mm x 300mm (WxLxH) measuring box. Other restrictions included the robot had to be completely autonomous with zero human interaction, must cost under $150 AUD (not including the micro-controller) and the robot must begin each round in the same orientation in which it was place in the measuring box. We were given the option for adding a lifting/flipping system to our robots. I knew it would require a lot more work but I couldn't resist the temptation of adding a "weapon" to the bot. The final cost came in a about $149, with a total weight of 999.4g and dimensions of 200x200x75mm. I was able to get my weight and dimensions so close to the mark by utilising weight calculation software incorporated into the 3D modeling program. On the competition day the sumo bot performed very well, taking out the competition in most battles. The flipper worked exactly as designed and managed to flip multiple opponents out of the arena. However during some of the later rounds, a small leak occurred in one of the seals in the pneumatic switch which resulted in pressure loss. This issue can be simply fixed using an o-ring sealant. My sumo robot won 1st place in the competition. Check out my Instructable for an in depth look and more videos.
http://www.instructables.com/id/Autonomous-Sumo-Battle-Bot-with-Pneumatic-Flipper-/?ALLSTEPS
Developed for a university sumo bot contest, Push/flip other robots out of the ring
- Actuators / output devices: 2 x Motors 47:1 Metal Gearmotor 25Dx52L mm HP
- Control method: autonomous
- CPU: AtMega128 16Mhz
- Power source: 11.1V 1300mAh LiPO
- Programming language: C
- Sensors / input devices: 3 SRF04 Ultrasonics, 4 IR line sensors
- Target environment: indoors, Sumo Arena