



Autonomous rock crawler
Update 2.12.2013 Just added the code the bot's been working from.
After putting together the LMR Start Here bot, I knew I wanted to do more. So I set out to convert one of my (many) RC projects into something autonomous. I figured what better choice than a slow moving crawler (so I could catch it if it went awol!).
I took a functioning truck and created an electronics tray out of 1mm carbon fiber. Everything is held on with servo tape. The servos are powered via the battery elimination circuit from the speed controller, which also made it easy to control the motor acting as another servo. Well, I say easy, but I'm still working out the kinks with the ESC. I plan to add a PING sensor for object detection in front, and probably a few IR sensors for side/rear/edges. An xbee serial link allows me to control it from my laptop for now, as I haven't added any sensors yet.
Mechanically, it's 4 wheel drive and 4 wheel steering. The differentials in the axles are currently locked with hot glue, so the added steering is pretty helpful on flat surfaces.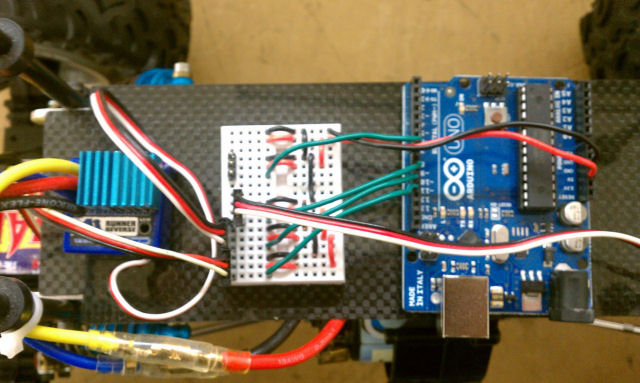

9/30/2012
So, been a while. I had put this project off over a year ago, but a recent post from bryanmeyer about his similar project put it back in my head. As mentioned in the comments, I had issues with the speed controller I had chosen, namely it did not store calibration settings between battery packs. Every time power was removed, it would need to be recalibrated as soon as a battery was plugged in. I've managed to do that in code, still a bit sketch but it does work as long as I remember to command it to go forward first thing. (It assumes the first direction it is given will always be forward, start with reverse, and that becomes forward...)
And here is the long overdue shot of the body that it will be running.

(You will note the cat on the left. It ran into him during testing... and he didn't budge an inch. He is not impressed.)
Still no sensors installed, so fully reliant on commands I give it via xbee. Plans at this point are to build a power distribution circuit to provide regulated power from the main battery pack to the arduino. I would very much like to eliminate the 9v battery. Futher testing for control of the motor, primarily getting the speed where I want it. I'm thinking an accelerometer to measure incline, and sonar for forward object detection. I'm also taking out the rear steering servo, as the 1amp BEC on the speed controller is just not enough for two servos.
Crawls over things
- Actuators / output devices: Futaba hi torque servos, 55T lathe motor
- Control method: Autonomous and optional wireless xbee control
- CPU: Arduino Uno (atmega328)
- Power source: one 9V battery for MCU and sonar, Ni-MH batteries (7.2v total)
- Sensors / input devices: PING))) sonar, and maybe IR
- Target environment: Outdoors / Rough terrain