



Autonomous Robot UAN
UAN consists of a number of panels connected to a common I2C bus. Power supply to the panels is provided together with the communication cables. The lower level contains the MD22 motor controller, motors, batteries and voltage regulation circuitry.
Two 6V 3.2Ah batteries drive the robot. One battery is used to drive the electronic circuits, including the processor . In order to achieve this, its voltage is regulated to 5V using a low drop-out regulator. The other battery is used to drive the motors directly. This approach was preferred over a single battery solution as the voltage level on the processor board is not affected when the motor supply demand increases.
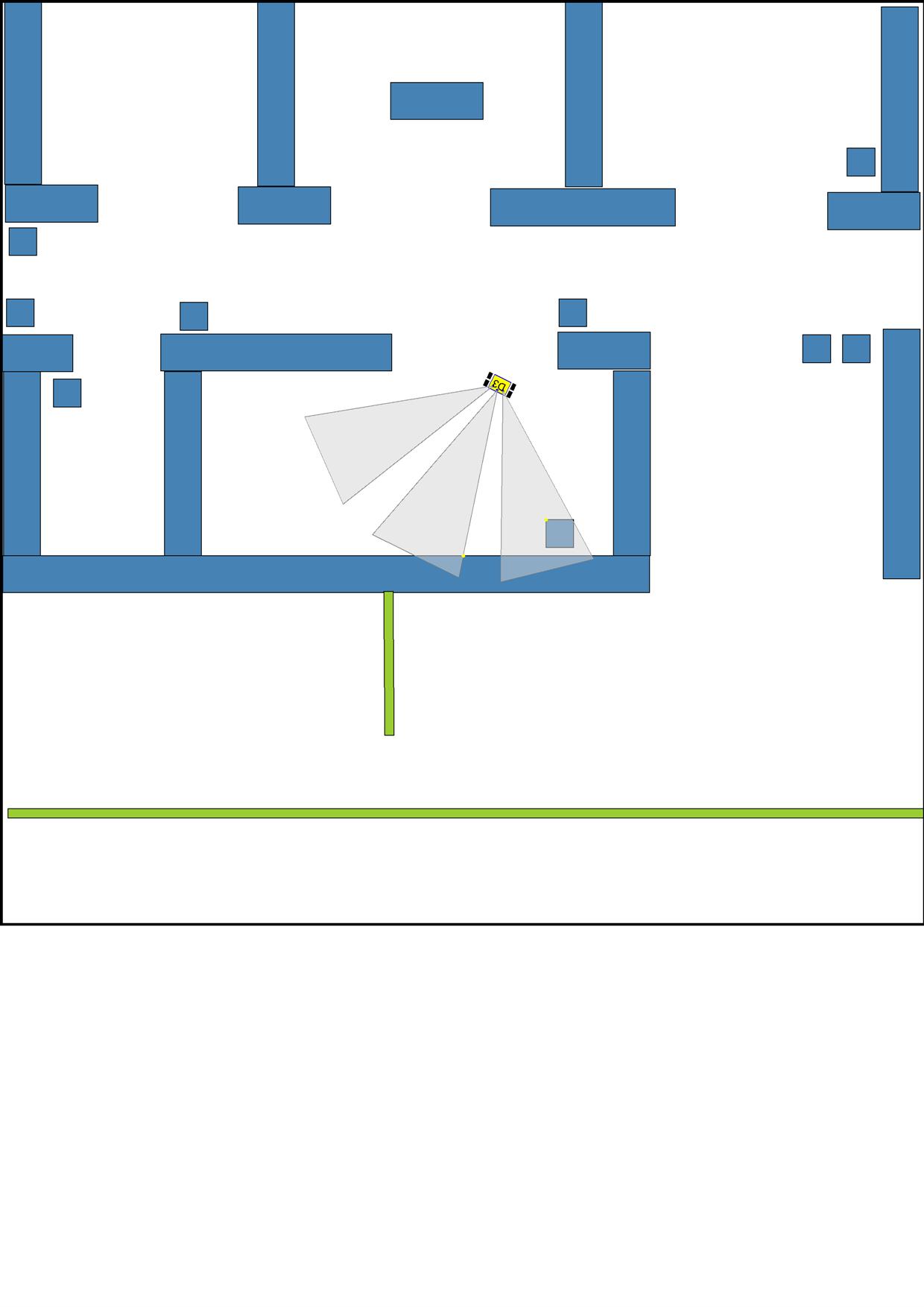
Three SRF10 sensors are used to detect obstacles in a range in excess of 180 degrees. The Viper-LITE and Viper-I/O boards are mounted on the topmost panel, since the switches on the Viper-I/O are used to administer the robot, and the CompactFLASH must be easily accessible as it is used to store the robot configuration files.
Nice thing is that I have also built a robot simulator program where controllers can be tested and then they can be put directly on UAN... maybe I'll put it online one of these days.....
Programmable behaviour
- Actuators / output devices: 4 motors
- Control method: Full autonomous
- CPU: Viper-LITE
- Operating system: Windows CE 5
- Power source: 6V *2
- Programming language: C, C#
- Sensors / input devices: SRF05 *3, CMPS05
- Target environment: Indoor or outdoor