



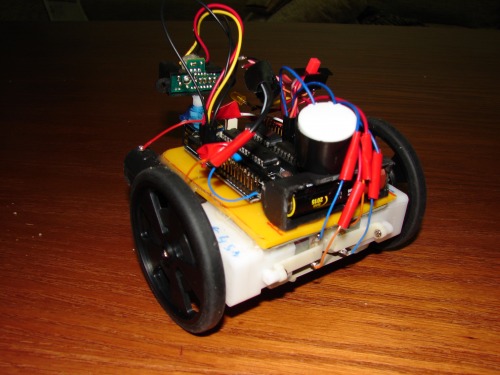
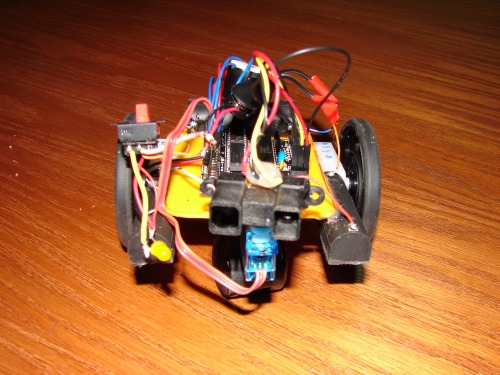
Autonomous object avoider(first version)
My "start here" attempt(and also sorry me for my language) with some kind of manual design and some additional things like indication of state on/off photodiode , switch , and piezoelectric film to produce sound when it indicates an obstacle.
I already run out of space on this small platform so i want to disassemble it and try to adopt rc controlled jeep platform for purposes of increasing amount of sensors and adding some additional functionality
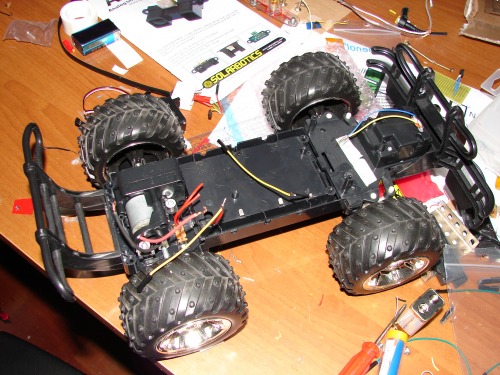
the only problem is that im not sure of the effects of adding +V2 to my picaxe chip).
Any ideas what functions or features would be possible on picaxe?
Navigate around via IR sensor
- Control method: Autonomus
- CPU: Picaxe 28x1
- Programming language: Picaxe basic
- Target environment: indoor