



Autonomous All Terrain Vehicle, aka, AATV.
AATV stands for, Autonomous All Terrain Vehicle.
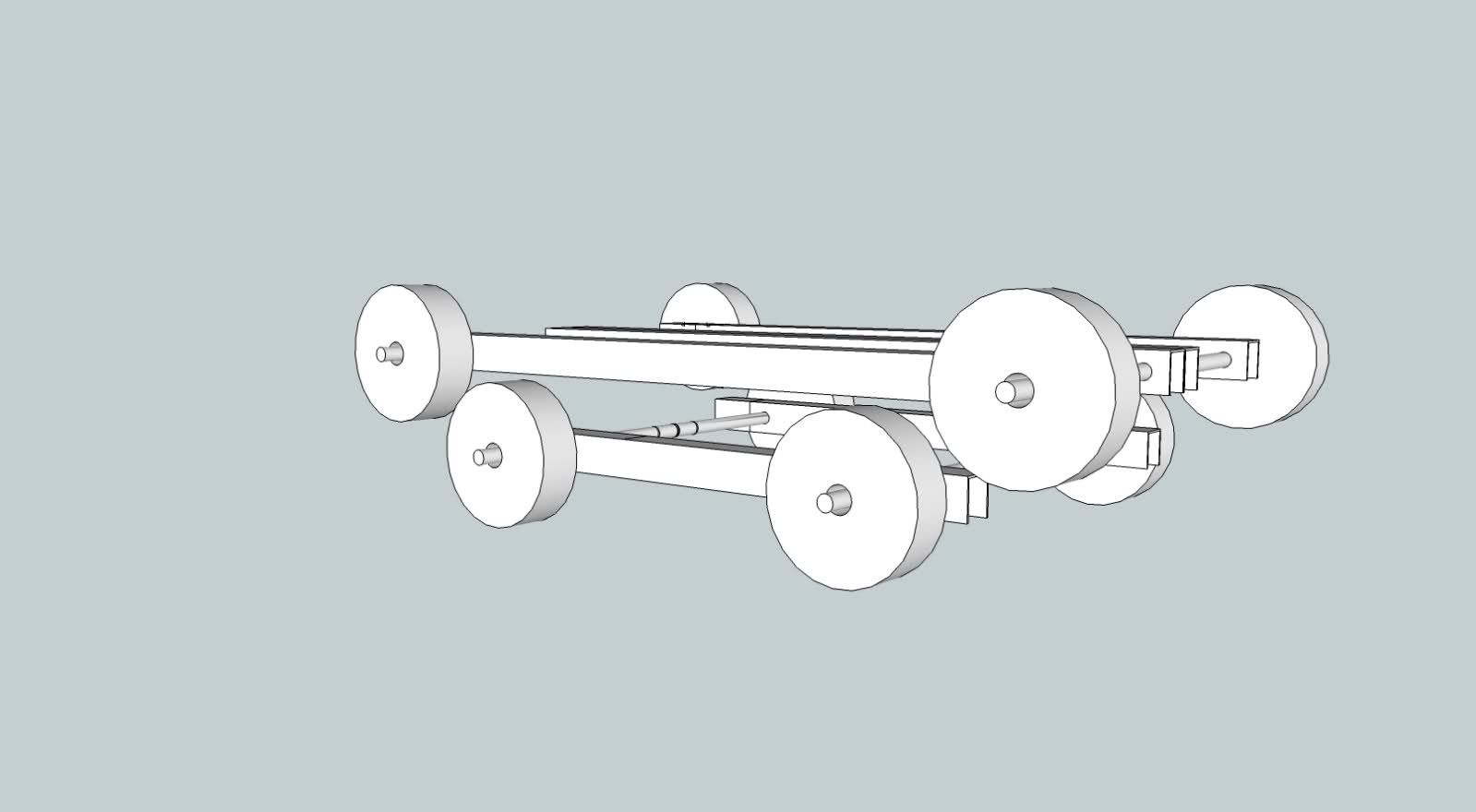
Fully custom metal chassis, and "tank" like tracks.
Electronics go inside scooter charger box
Motors and drive system is close to complete:

Very good deal for the motors, 18v motors + two proportional controller + gearboxes + two 18v batteries + two chargers, for 30€ brand new at the mall!
They have TONNES of torque, and aren't let down by speed either, gonna need PWM to keep a safe speed, can't wait to drive this thing around!
They also have a friction clutch, so I can set it so that if the motors stall because of something it won't ruin the gears and drain the battery!
Having my custom steel hubs machined, right now the wheels are on by using some fine improvisation
Strong enough to test, but not strong enough for me to trust them there for a long time.
Also got these for a home made lathe, and these for a new version of my coil gun, but that's another project.
{kind=link}
{kind=link}
Going to finish my other tank track tomorrow, and draw up a sketch of the chassis, stay tuned.
Sketch up picture of motor mount here
{kind=link}
Kind of a shitty motor mount system, but it seems functional.
Done a bit more.

Photo is kind of squashed...
Too much speed as you can see in the video, glad PWM exists, right now it's still a bit crooked and stuff, will only be able to make it perfect after having my other tank track finished!
other track is finished.

Tomorrow it will be RC.
Inside modem box:

Kyosho perfex receiver and battery pack, currently charging, getting close to driving it around :-)
Fail! only one of my servos is strong enough to move the button...
here's my stone age motor controller:

It is LOL worthy.
but it works...
Managed to remove the friction clutches, meaning I can now mount the motors properly, but unfortunately I have to remake the chassis...
So instead of keeping the same chassis style I'm going for something more like this:
It will be able to go over bigger stuff like this.
Just rose one side of the chassis, making it like this:
Hummer cover was temporary.
Made a metal top and bottom out of a steel panel I found(from a washing machine side panel)
Motor controllers with a fan(not sure if it's needed, we'll see.
Chassis is built out of aluminium strips and lots of steel rod, gives it a robust but easy to work with chassis, not very light though!
Currently getting the arduino to filter the radio controlled signals, I have this remote:

2 channels, both invertable and trimmable, good range.
but this isn't made for a differential steering system, so I'll have to code something around it to make it easy to accelerate with one, and turn with the other, right now I accelerate with both, it's lame.
Reading the receiver with the pulseIn command.
Arduino seems like it's overkill for this, too many unused pins, I doubt I'll add anything else so I'll slap an attiny26 in there, maybe some sensors in case seomthing goes wrong.
Next outdoor robot will have wheels and will actually be autonomous.
Radio controlled with some assist sensors in case connection breaks
- Actuators / output devices: Two 18v drill motors
- Control method: rc hybrid
- CPU: atmega328
- Power source: 2 18v batteries
- Programming language: C
- Sensors / input devices: Not sure yet
- Target environment: Outdoors / Rough terrain