





after all the design its done and 3d printing all the parts, its time to start with electronics, im using an A4988 motor driver to test motors, the motors in the bot are nema 17 stepper motors
4 motors are used and connect as the image below each motor with it respective A4988 driver
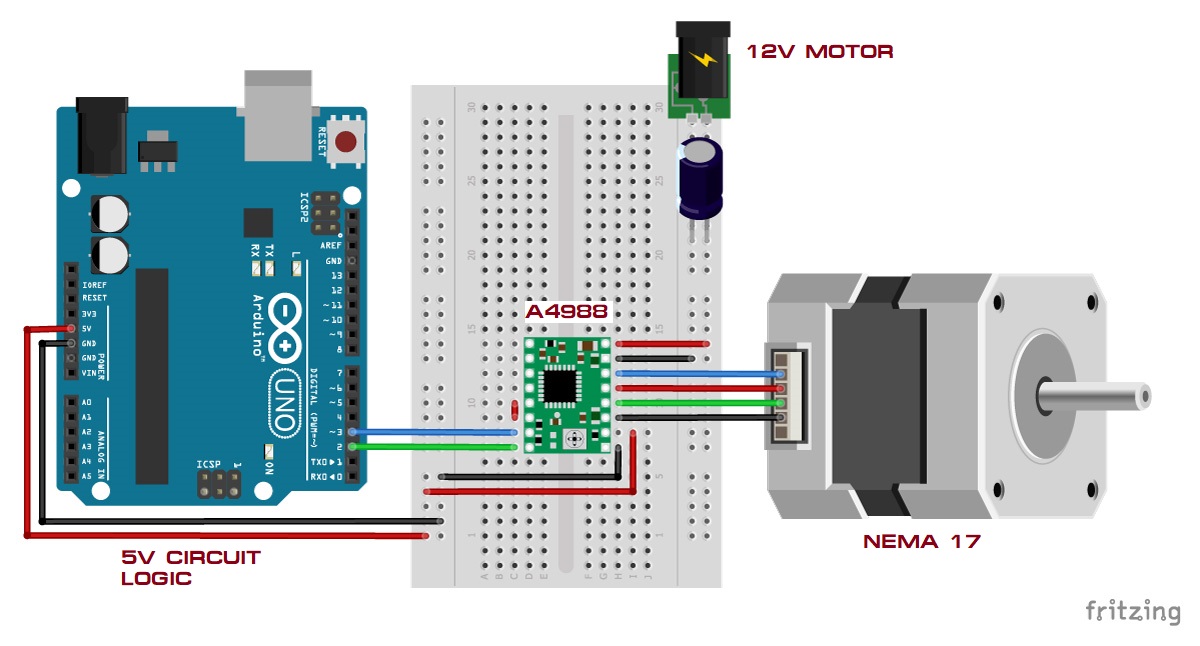 This stepper motor driver lets you control one bipolar stepper motor at up to 2A output current per coil and the actual battery its a 11.1v 2A lipo.
This stepper motor driver lets you control one bipolar stepper motor at up to 2A output current per coil and the actual battery its a 11.1v 2A lipo.
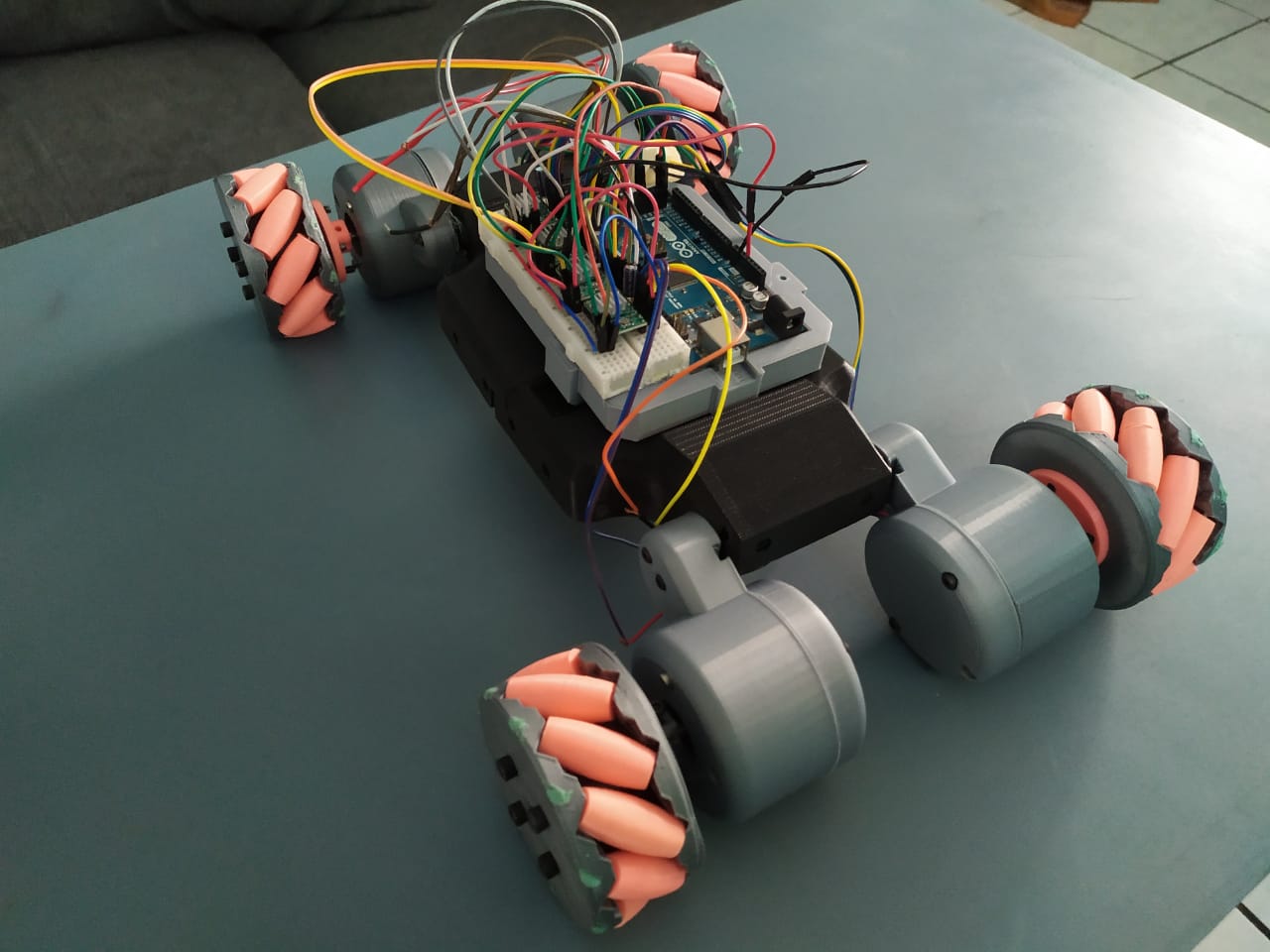
I decide to use a protoboard to test before designing the PCB circuit, this way helps me understand the circuits behavior, negative side is that protoboard and wiring takes a lot of place.
For testing a motor spin direction vs wiring i use the next simple code in Arduino IDE for the arduinoMega2560 that will be controlling the motor drivers
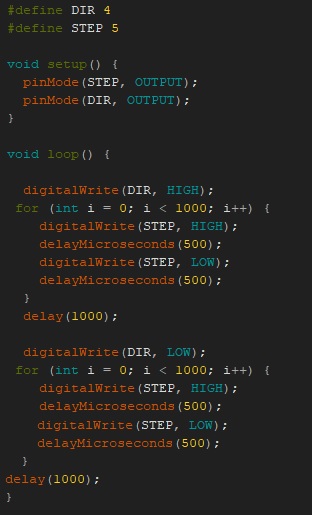
what this code do is basically declare the direction pin and the step pin of our A4988 stepper motor driver and then we sen the motor to spin clockwise delay a second and spin counter clockwise.
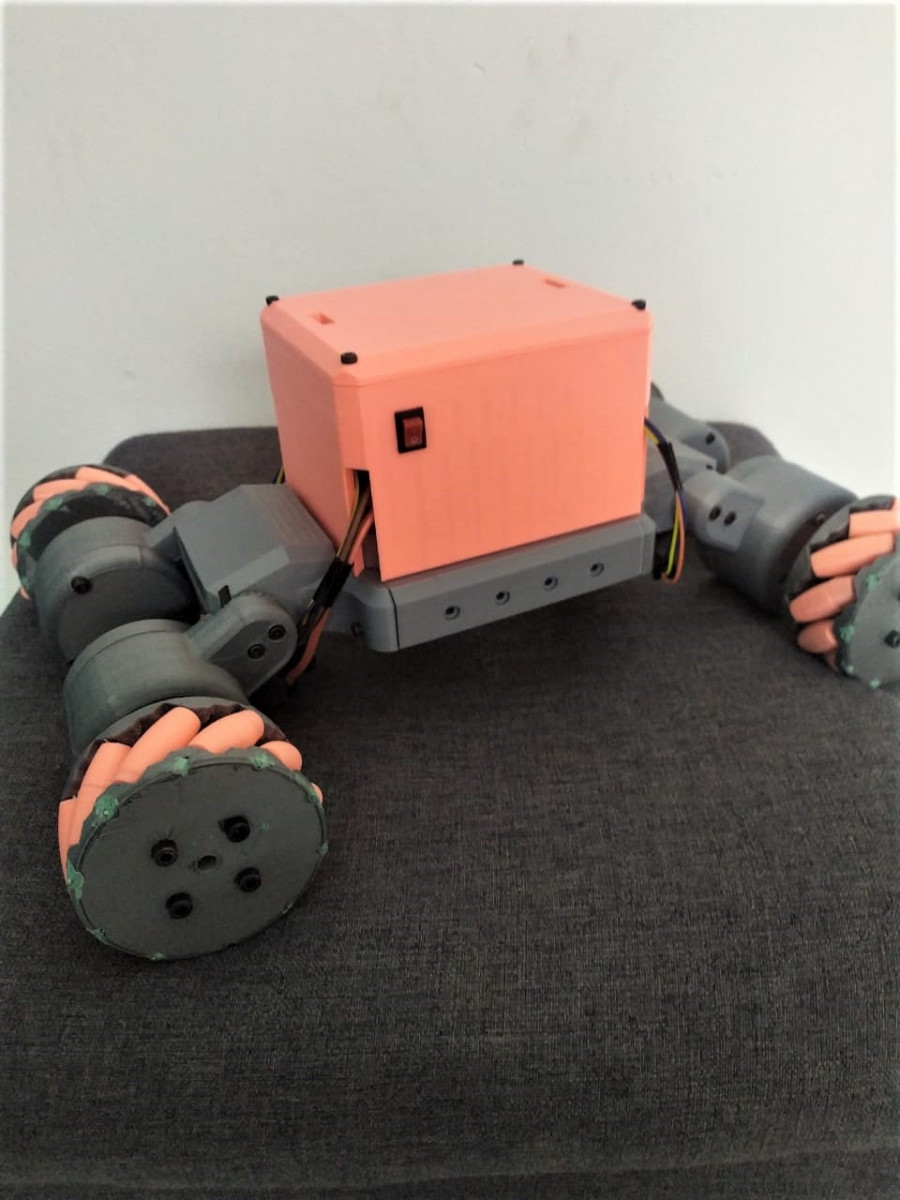
Just a simple design to cover all
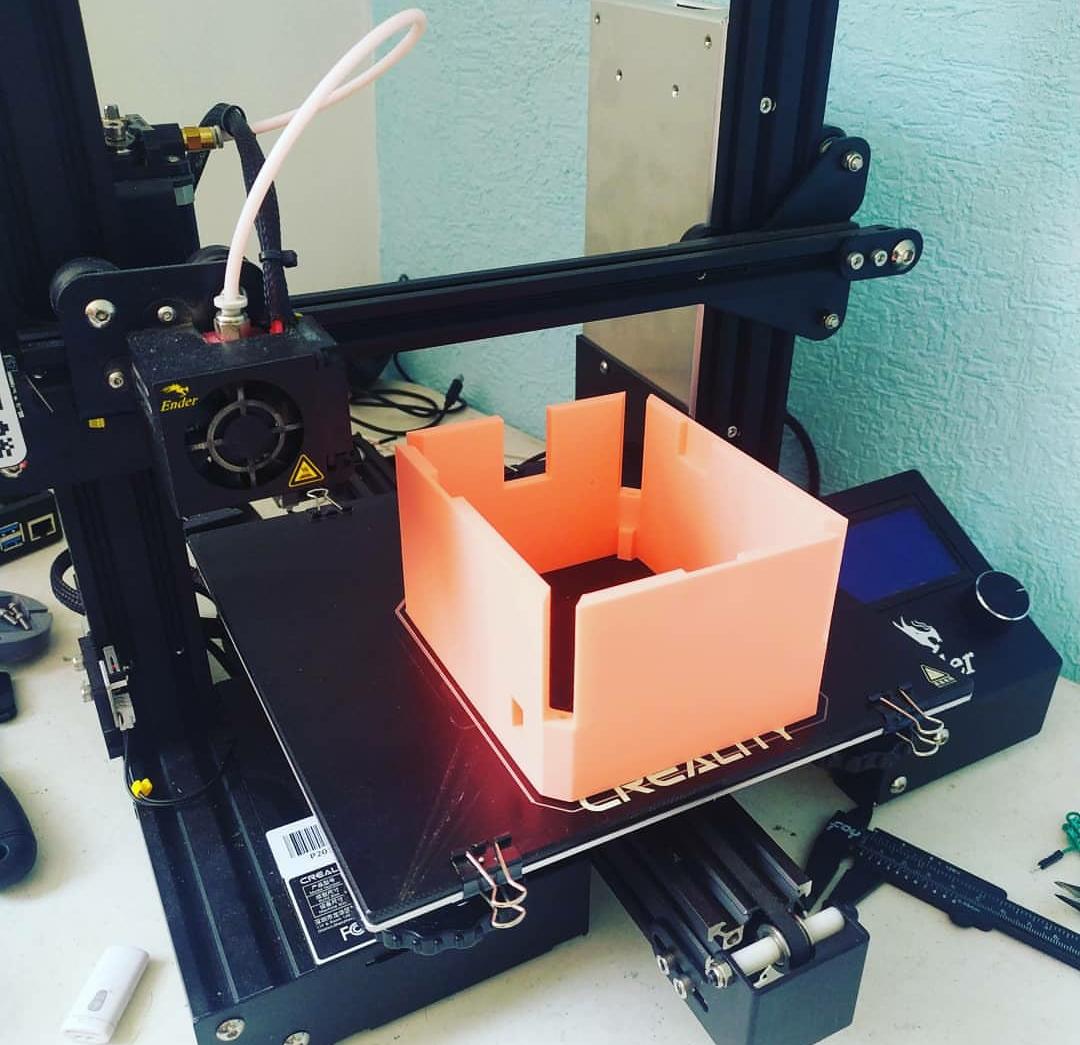
then its time for assemble the case, the top part and a switch
this is as far as i got in this robot, this week ill be working on its bluetooth app control and update for next week . if you like im also updating pictures and videos of the project in my instagram @factory4_robotics