



Automated juggling machine
Automated Juggling machine -Case Study of closed loop System
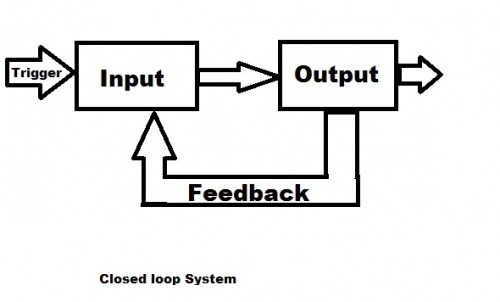
What is Feedback
Feedback occurs when outputs of a system are routed back as inputs as part of a chain of cause-and-effect that forms a circuit or loop.The system can then be said to feed back into itself. The notion of cause-and-effect has to be handled carefully when applied to feedback systems. The use of feedback is widespread in the design of electronic amplifiers, oscillators, and stateful logic circuit elements such as flip-flops and counters. Electronic feedback systems are also very commonly used to control mechanical, thermal and other physical processes. In this article we are implementing a juggling system which uses closed feedback loop.
Overview
Juggling is a task which requires adjustment and Course corrections in in the timings of throws and catches to sustain continuation. Thus rendering Feedback loop to be a suitable solution for engineering problems similar to jugglig We are going to implement a electro-mechanical system similar to below gif to perform juggling. We simplified the problem by rolling the balls over a plane insted of throwing up in air. Though this may not be same as actual juggling still the fundamental mechanics of juggling is preserved albeit with reduced complexiety.
Planning the trajectory of the balls
If you study the above gif carefully no more than one throw and or catch is performed at any given time, also no more than one ball is held in one hand at any instant also the path traced by the balls is similar to a symbol of infinity
Slighttly more Realistic depiction would be.
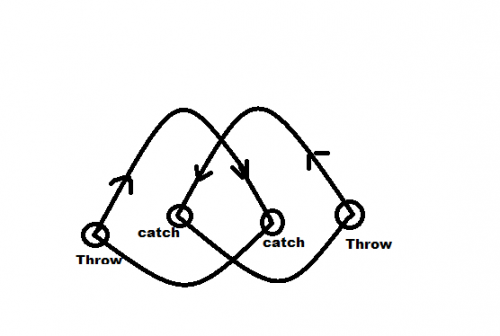
Building the trajectory of the balls
Track for juggling is built based on above observation we use marbles for balls to roll in this track



Building the armature
Now we need armature to hit the ball to make it roll through the trajectory after several different attempts we decided to use the steering mechanism found in remote operated toys to bulild actuator armature.
We need gravity's assistance to for the ball to roll downward thus we incline the plane at a slight angle.

Control system planning and construction
Once the armature is built we are left with the need to build sensors to detect the roll of the ball and trigger the arm, We experimented with several sensors but a simple electro mechanical switch seemed perfect for the purpose The below pictures will illustrte the working of electro mechanical switch used
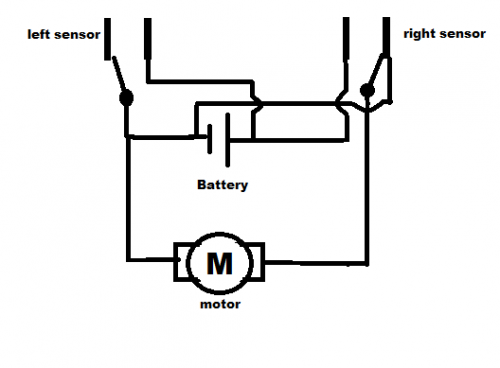 sensor in neutral mode
sensor in neutral mode 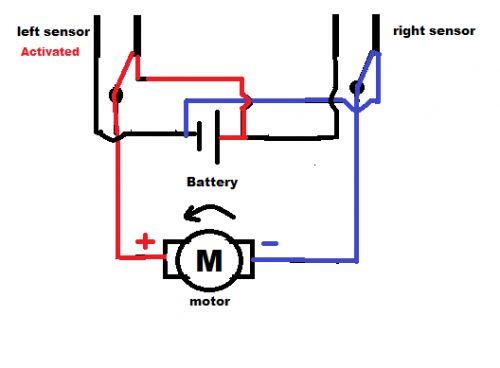 activated left sensor
activated left sensor 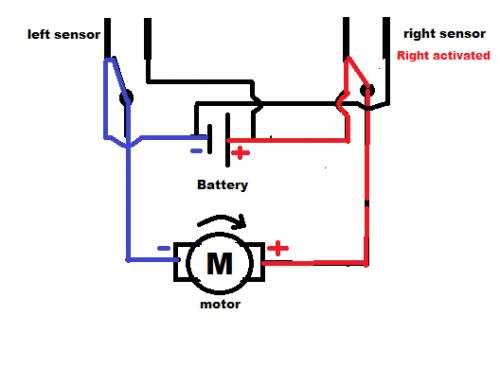 sensor is right sensor
sensor is right sensor
We use a thin metal filament as as contact switch, which can be easily swayed when the ball rolls through.
whenever the marble passes through the thin conductive metal filament the motor rotates and activates the armature to hit the ball through the trajectory. Rotation of armature in either clockwise or anticlockwise direction depends on whichever switch is activated. when two of the marbles are set to rest at left and right bottom of the trajectory, and a third marble is rolled on to hit the swith. The resting marble on the opposide side of activated switch is set in motion. The marbles set in motion hit the swithes alternatively setting the resting marble at the opposite end in motion. Thus prepetuating the juggling action.
Conclusion
Thus we have built a simple self regulating juggling machine using the concept of closed loop feedback system without the use of any micro-controllers or processors.