


Making an automated dynamic toy ramp
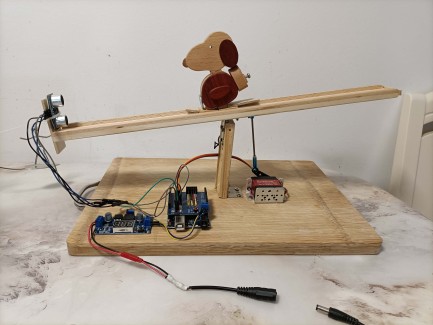
Bought a dynamic walking toy and wanted to automate it so I wouldn't have to pick it up and place it at the top of the ramp. Learned some interesting things about dynamic walking toys. The ramp cannot be perfectly smooth or the toy does not get enough friction to make it walk - very sensitive. Also have to play with the weight in front and back of the toy to get it to rock just right. I modified the toy by extending the rear foot so that it could slide backward down the ramp without falling over backward. Also had to extend the front foot for the same reason.
The ultrasonic sensor is very sensitive too to a small object. The Snoopy toy presents an odd shape profile and narrow so that sometimes the sensor returns a zero value instead of where the toy is located. Perhaps mounting the sensor higher up would return more reliable results.
I used a door hinge to mount the ramp to a pedestal but there is a lot of slop in the hinge so a better mounting system would be helpful,
Electronics are 5 volt power supply to supply enough amps for the Arduino sensor shield to power the standard size servo. And a ultrasonic sensor. Pretty simple.
The sensor can be used to detect a variety of machine states:
- if Snoopy has fallen off the ramp
- if Snoopy is near the sensor end of ramp
- if Snoopy is near the far end of the ramp
- if Snoopy is stuck somewhere in between (in which you can jog the ramp to get him started again)
- and optionally the speed of Snoopy on the ramp