


Auto Navigating Intelligent Arduino Robot
UPDATE 7: I'm still busy with making a good chassis. Soon I will update this page with new photos and a video of my robot in action.
UPDATE 6: I'm not going to contact Technobotsonline.com, I think that I have a good solution for the problem. Because problaby the voltage that the 2 NiMH AAs give isn't high enough. The motors that come with the Twin Motor Gearbox Kit problably work good with a voltage of 1.5V - 4.5V. The NiMH AAs give 2.4V together. But there is ~1V lost in the H-Bride / Motordriver. 2.4V - 1V = only 1.4V. Plus the motors have to work harder because of the transmission. But the gearbox works well when I just connect the leads of the motors to the 2 AA batteryholder by hand(without the H-Bridge, because the motors then really get their 2.4V). So I problaby going to order a NiMH 3.6V batterypack with 3 cells and 2200 mAH capacity and a NiMH batterypack charger. 3.6V - ~1V = ~2.6 V, which I hope is enough Volts for my motors.
P.S. : When I finally get those motors working well I'm going to design the chassis. Then I'm going to post some new pics from my new chassis with the Arduino and other electronics mounted. Then I'm also going to post a video. After all that' s done I'm going to connect my SR05 and redesign the code. Then I can begin with extra features, like automatically turned on LEDs when it' s dark and a lot more!
UPDATE 5: It isn't the motorchip which doesn't gives enough power, it' s the gearbox which is causing problems. Some times the gears block and at startup one side of the gearbox won't run. I'n considering contacting Technobots for a replacement. And if they don't want to replace the gearbox I'm problably going to make my own gearbox with the axles and gears from the Twin Motor Gearbox kit!
UPDATE 4: Today I ordered a new motordriver IC because my old L293D probably can't handle the current that my motors draw. L293Ds can't handle more then 0.6 A (600 mA) current per channel continuous you know. The SN754410 from TI I ordered can handle the double current! And is cheaper. I also ordered some IR Emitters and Receivers because I'm going to make a remote control interface for my robot. Then I can control him like a RC car and let it' s LEDs blink. Maybe I will add control with the computer later on. With a bluetooth module and camera on the bot. But that will be more advanced.
I'm not going to use my Meccano chassis anymore my Twin Motor Gearbox and Ballcaster can't me mounted properly on it. Instead I will make a custom chassis of some aluminium. When my aluminium chassis is finished I will add some pics and replace the old Meccano chassis ones. :)
UPDATE 3: Today builded my Twin Motor Gearbox Kit and wired up my L293D for some motorcontrol testing! Now I have to make the chassis, get the SRF05 Ultrasonic Sensor working and then program the full robot program! Tomorrow I'm going to try to connect the SRF05 sensor and then program the full code.
UPDATE 2: Yesterday I received my order from Technobotsonline.com. Soon I will show you my full featured working Arduino Robot. But I still have a lot of work to do. Build the Twin Motor Gearbox Kit, connect the L293D to the Arduino, get my SRF05 working with my Arduino and solder a lot of components. Then I'll have to write the code.
UPDATE 1: Today I ordered the final order for my robot at Technobotsonline.com . So soon I will be able to show my complete robot here. A video will be added when it' s avaible!
P.S. : My robot will not be using a Sharp IR, but a Devantech SRF05 Ultrasonic sensor. Because I can't get the Sharp IR sensor working. It lets my whole Arduino 'crash'/freeze. I still don't know the problem.
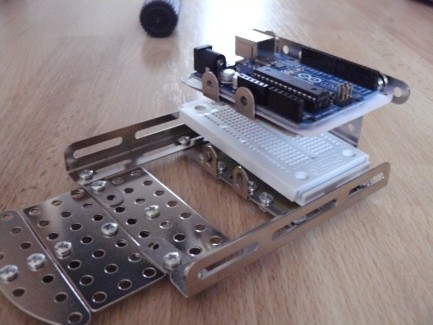
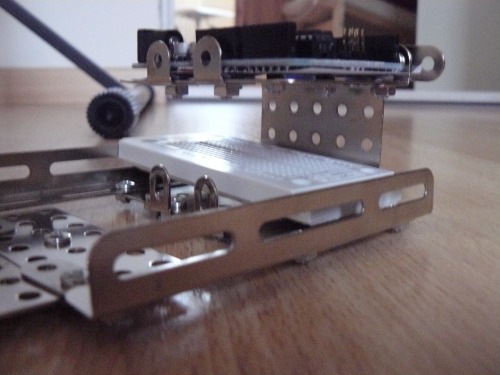
This is my Arduino Robot so far. I'm still waiting on the Gearboxes and Motordriver IC. I build a chassis of Meccano. My robot will have a Security Mode with a PIR Motion Sensor. It will also have a LDR and some LEDs onboard. If the LDR detects that it is dark the LEDs will automatically turn on. I'm also planning to add my DFrobot LCD keypadshield later on. My robot will have a classic toggle switch as on/off switch. See pictures below.


A video will be added later on when I got my robot really working!
Navigate around, while avoiding objects
- Actuators / output devices: Some LEDs, Twin Motor Gearbox Kit, DFRobot LCD Keypadshield (planned)
- Control method: Arduino Microcontroller
- CPU: arduino uno
- Operating system: Custom Arduino C/Wiring program
- Power source: 6 AA NiMH for Arduino + 2 AA NiMH for motors
- Programming language: Arduino C/Wiring
- Sensors / input devices: LDR (planned), PIR Motion Sensor (planned), Devantech SRF05 Ultrasonic Sensor
- Target environment: indoor