



auto/manual manipulator- UPDATE 12-5-26 (video added)
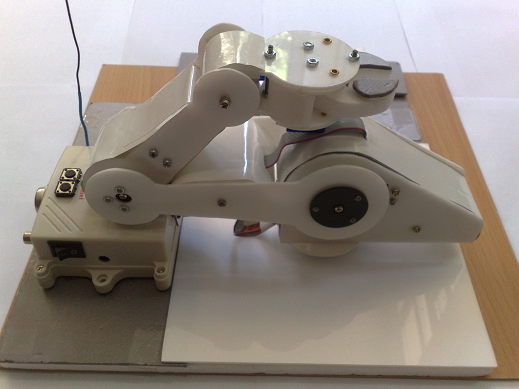
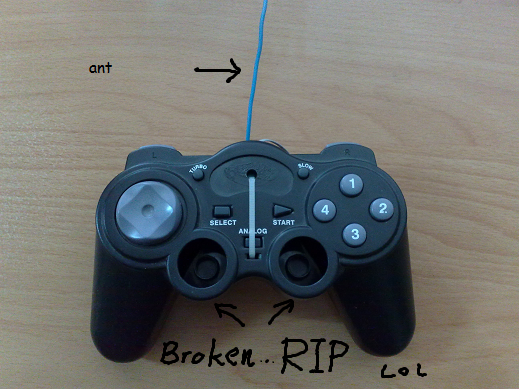
hey there, its not actually my first robot but i thought i'm gonna put this here as the first one. it's just a simple arm with 5 servos which can move automatically (by recognizing the object on the specific plate which has an IR sensor) or manually (by a modified joystick).in manual mode there's a wireless cam which lets u control the robot from another room by watching the monitor.
*B O D Y
--------------
-the main material of design is plaxy which can be cut and curved (by heat) i used screws-spacers and glue to put them together then filled the empty spaces with foam and finally covered it by some kind of paper stick (sorry i don't know whats it's actual name..)
*M O T O R S
---------------------
-the servos i used are:
3x sg5010 (torque= 5kg/cm)
2x sg90 (torque=1.4kg/cm)


*P R O C E S S O R S
-----------------------------------
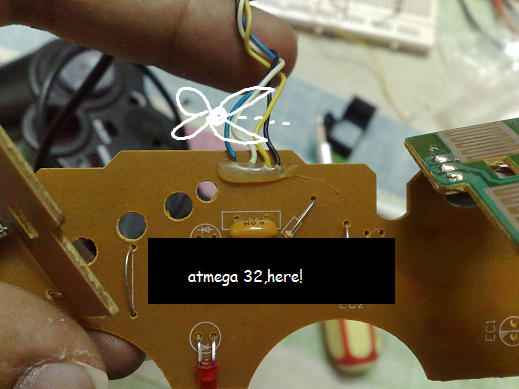
-for some economic reasons i didn't but new micro controllers and just used those i had.
atmega32 (main processor)
atmega32 (used in joystick as transmitter)
atmega8 (for receiver.only decoding)
*S E N S O R S / M O D U L E S
-------------------------------------------------
-there's only one sensor (IR) which is used to trigger when the object is on the plate.its a simple couple of ir-led and ir- photo transistor.when the object obstructs the light,the output voltage will be high.
-a couple of RF modules r used for manual control.
HMT 433 transmitter module
HMR 433 receiver module
-a wireless cam for monitoring
<

*O T H E R F E A T U R E S
--------------------------------------------
-i used a 7805k for servo power (high current) and a 7805c for main board.
-2 led's show the mode and one is used for power.
-two buttons on the top of main box let you reset the robot and change the mode.
-4xAAA batteries used for the modified joystick
*S H O W T I M E
----------------------------
-well theres a command in bascomAvr which can control up to 14 servos but so far i couldn't handle it,cause the output signal for each servo has wrong timing.the best timing is when i use 8mhz internal osc but still it makes a bad noise on servos.(i never tried external crystal to see if it works better). using pwm feature is not a good idea.there's only 3 pwm and i had to calculate a lot so i end up using "pulseout" and make the chain of signals for all the servos manually which causes a limit,you know why. even now its not working quite right and there's still some noises but generally its good.
_______________________________
12/5/26
ok the video is added eventually and u can see how terrible it works.sorry!:)
any suggestion to improve? (:
grab and moving the objects
- Actuators / output devices: IR, 433mhz fr modules, 2x sg90 servos, 3x sg5010 servos
- Control method: Rf link or autonomous
- CPU: 2x atmega32, 1x atmega8
- Power source: 4 AAA Cells, 9v adaptor
- Programming language: Bascom-AVR
- Sensors / input devices: IR, RF module
- Target environment: indoor