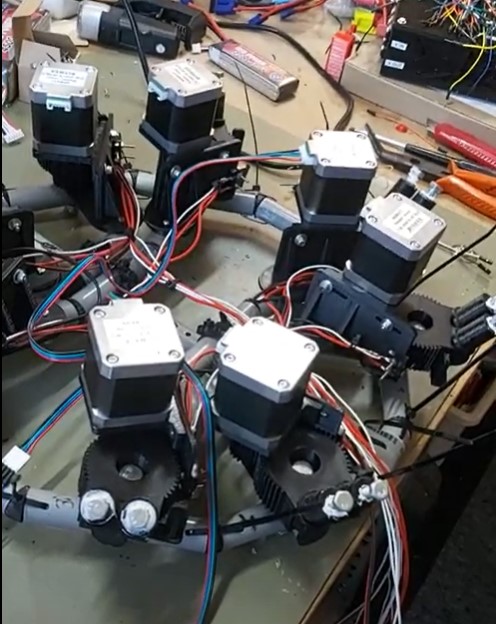
The spider is going to be basically a female Black Widow but then 200 times bigger as the original one. I like to do things difficult therefore I think it is not enough to use servos directly on the joints to make them rotate. I want to use steppers as 'muscles' controlling the joints with tendons. Much like in our own arms and legs.
Most joints in the spiders leg are elbow type joints.
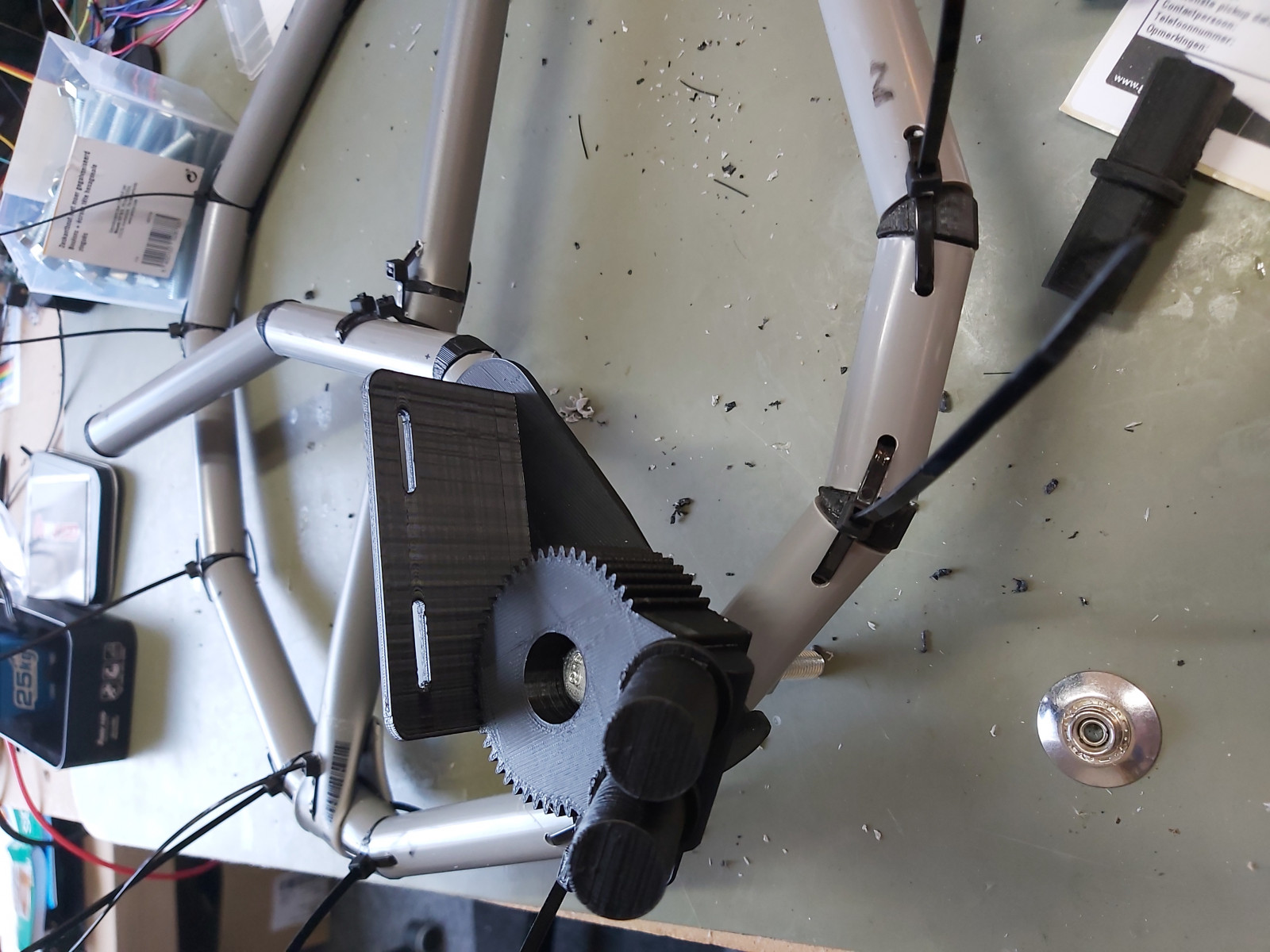
I designed a simple elbow type joint for 3D printing, created tendons with normal wire running thru PTFE tubing. Much like the brake cabling on your bike. After a few failed experiments this is a working joint:


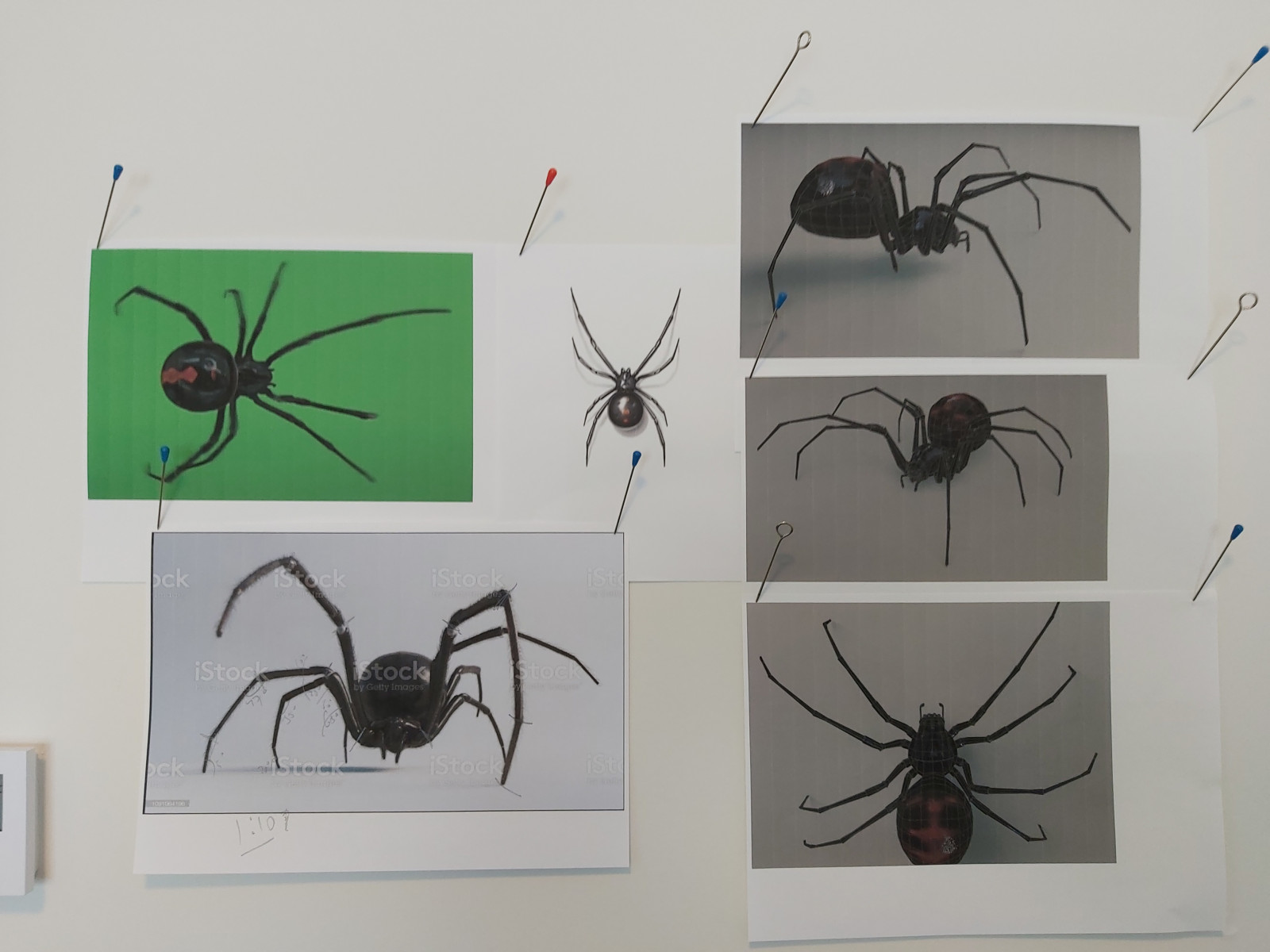
The end result will look like a robot, not like a life-like spider. Except for the dimensions and the mobility. I want you to see a robot but also at the same time want to give you a uncomfortable feeling when this spider walks up to you :)
So, what exactly does a Black Widow look like? These images are my inspiration:
And I made a 1/3 scale model out of wood to check how the legs move without getting entangled

I was inspired by the StrandBeests of Theo Jansen when I decided on how to assemble the spider. This is base of the front part of the body. This part will hold the legs and fangs...



The vertical part wil be used to mount the stepper
And getting ready for legs 4L and 4R. Noticed that i need to remove the joints to install the limit switches first :(
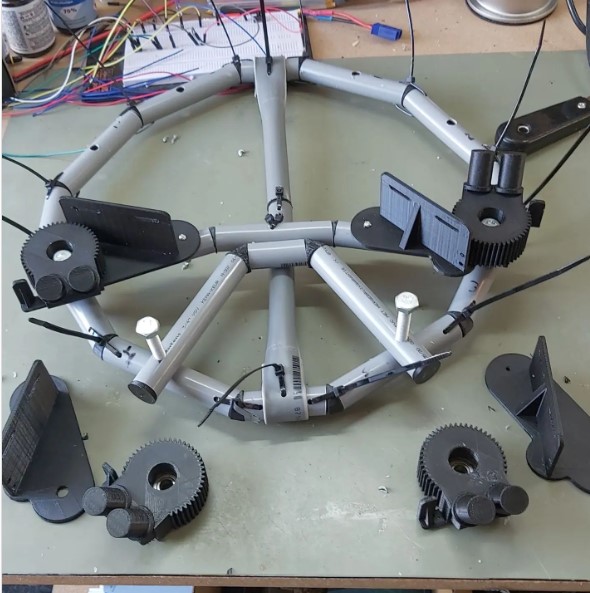
I designed and printed better, stronger hips. They can take steel reinforcement now. Installed all 8 on the front body frame
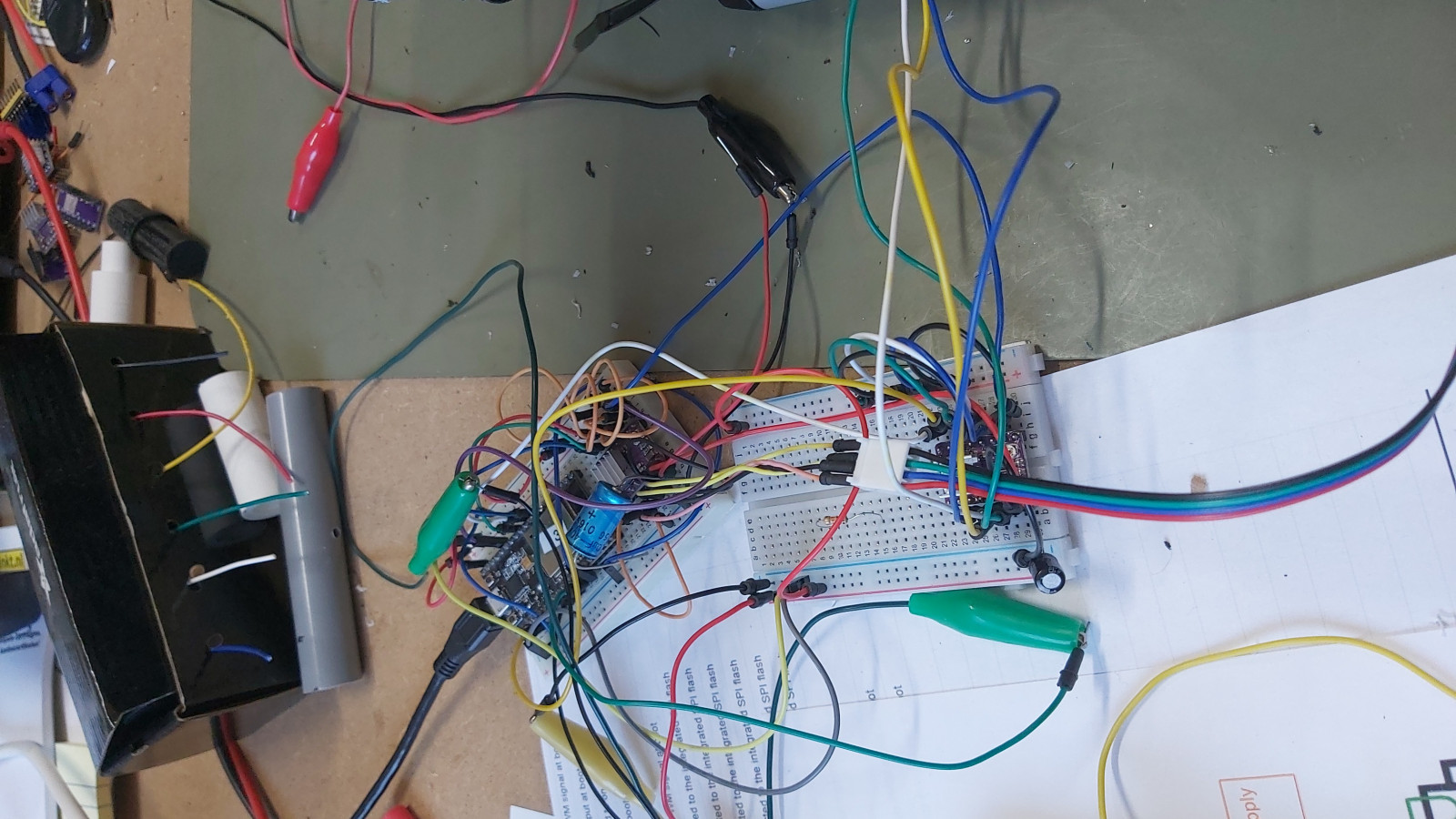
Then I tested the steering electronics
I found out that the front body was to small. With that size, the hind legs couldn't move. So I increased the width of the front body

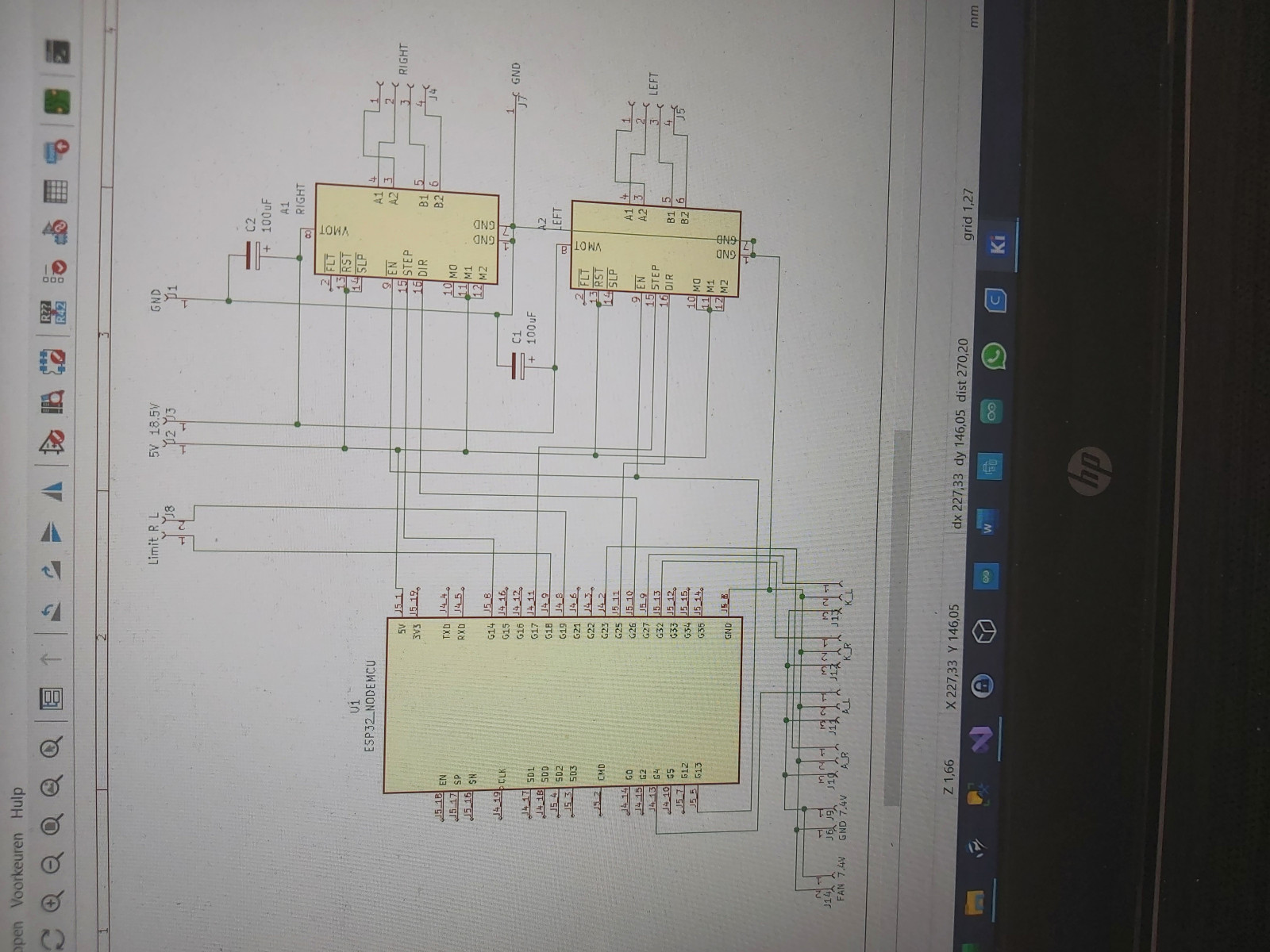
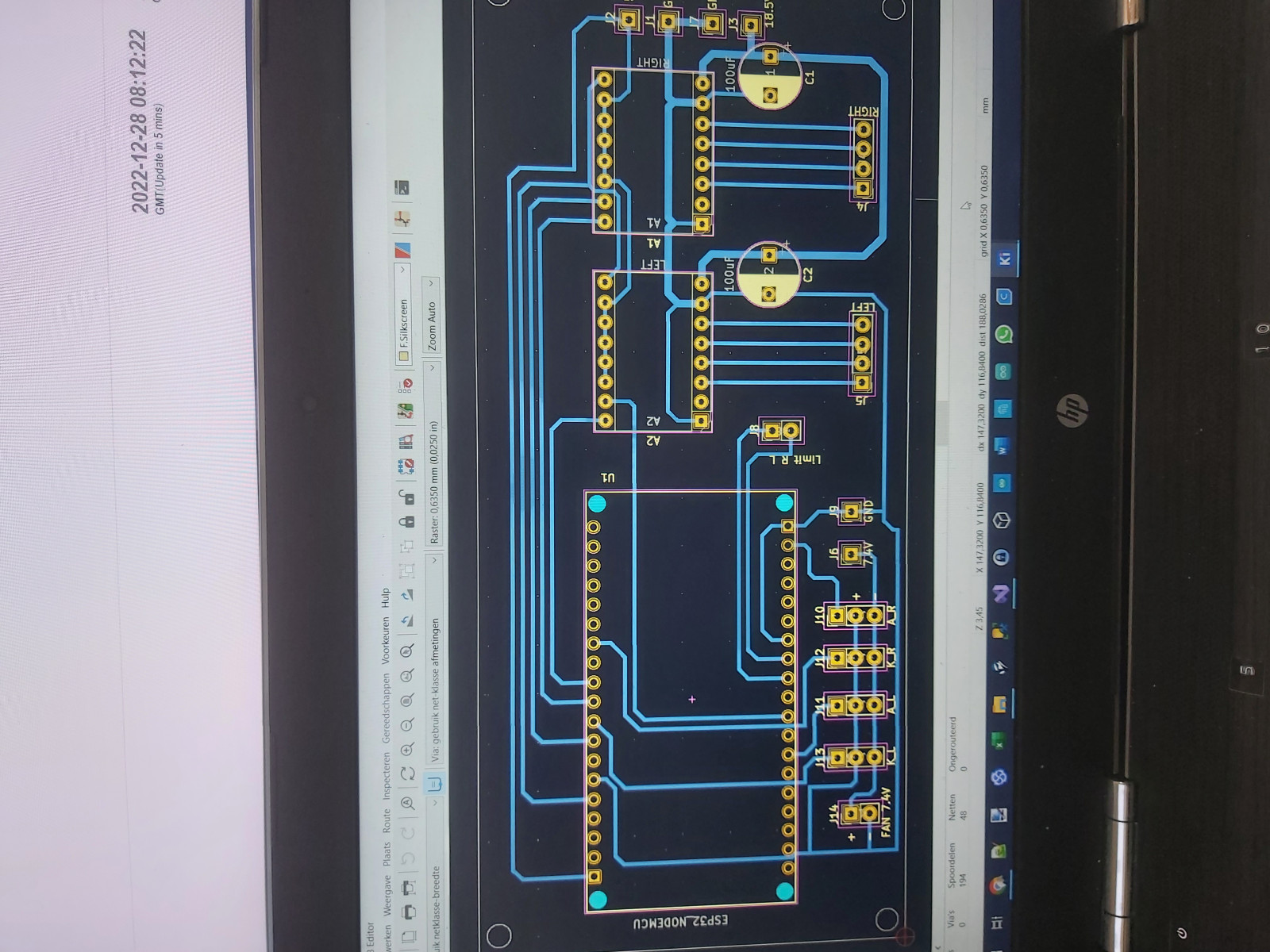
I Used Kicad to design the PCB that will be used to control the legs. Both the stepper for the hip as the servo's for the knee and ankle.