


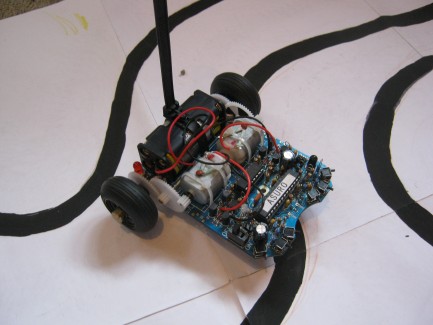
ASURO line follower
This is a simple robot made from a kit I bought from a local electronics shop. I have made a simple line follower program for it and thought I would upload it here to see what you think. I made the mat with the line on it from 6 a4 bits of paper taped together. I then painted a black line on it. The robot cost me $95 NZD (74 USD). It has two phototrasisters, six collision sensors, two rotation sensors and multiple leds. It uses a ATmega8L microcontroler and is programable in C++. This is my first robot to be uploaded to LMR so i'd like to see what people think. I am needing some robot parts so if anyone knows a good site I could order from I would be greatfull if you could tell me.
Line following
- Actuators / output devices: 2x3volt motors
- Control method: autonomous
- CPU: ATmega8L
- Power source: 4x AAA
- Programming language: C++
- Sensors / input devices: Phototransistors(2)
- Target environment: indoor