



ArduPi Webcam Tankbot
This is my first robot project though I have been working with Microcontrollers and Embedded Linux for a little while. As of writing (3/1/13) this is still very much a work in progress, but most of the hardware construction has been completed. This robot will provide a remotely controlled, mobile platform for a pan/tilt webcam. It is based on the excellent Tamiya Tracked Chassis Kit with the Dual DC Motors connected to the Arduino Motor Shield R3 via the Screw Terminal. The Pan/Tilt function is provided by two Tinkerkit Servos which also allows them to be connected to the Motor Shield without taking up additional pins. The webcam is connected via USB to the Raspberry Pi and streamed to an online server using MJPG-Streamer and an Edimax wifi dongle. Control for the Arduino can be provided via Bluetooth Bee, or XBee but the eventual goal is to connect and control the Arduino from the Raspberry Pi. As the RPi USB ports will be filled up with the webcam and wifi, connection will likely be achieved via GPIO.
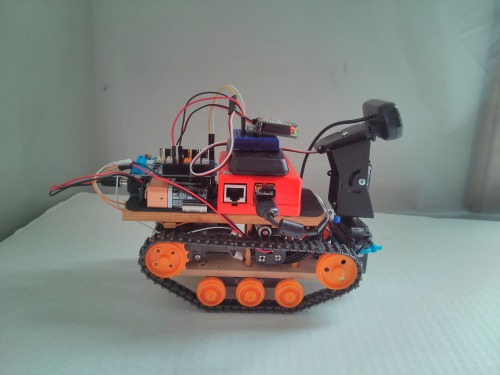
Web controllable mobile platform for webcam mounted on pan/tilt turret
- Actuators / output devices: Tamiya Dual DC Motors, Tinkerkit Micro Servo, Tinkerkit Contin-Rotation Servo
- Control method: Bluetooth Bee, XBee or Edimax Wifi Dongle
- CPU: Raspberry Pi Version B
- Operating system: Raspbian Linux
- Power source: 9v for Arduino, seperate AA pack for motors, Cell phone charger for RPi
- Programming language: Python, Arduino C++, Firmata, 12c, node.js
- Sensors / input devices: MJPG-Streamer, Arduino Uno, Arduino Motor Shield R3, Rocketfish Webcam
- Target environment: indoor