


Arduino tank project
This was my first build and I consider it an on going project. I built the frame work and drive line about a year ago. Due to lack of budget it sat until about three months ago when I really got going on it. I start my programing on a Basic stamp a few years back. Then the computer I had then died and last January I started over teaching myself on the Arduino. I have been learning from my mistakes along the way and in the past few months LMR has really helped me progress. I started off with just using two transistors for motor drivers and a 9 volt battery for power and quickly found out that a 9 volt doesn't have enough power to drive the motors so I switched over to a 6 cell NiMH r/c battery. I have recently built a motor driver using two BA6886N chips and now have reverse along with dual track turning. I had the hardest time getting the Ping to work like I wanted and after reading allot of other peoples code and even more trial and error I finally have it working good. I have more plans for it and as long as it is tracked and using the Arduino I am going to consider it the same bot.

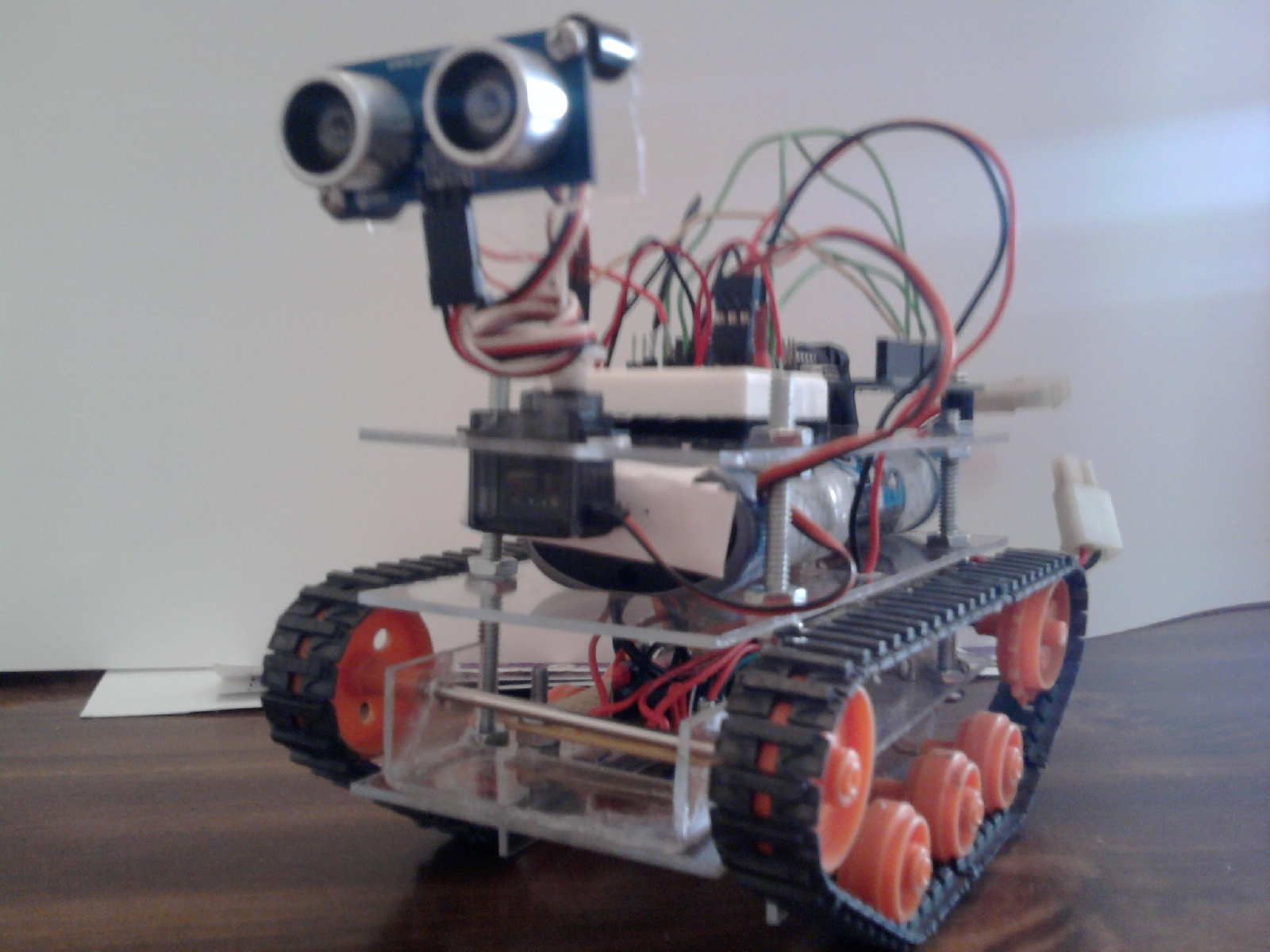
I am working on a new lighter chassis which is a little better design than my first. I also am going to mount the Ping on a servo so it can scan and make desicions. The programing is almost together. Just have to test it and see if it works. Pics to follow soon.

All new chassis made from plexiglass servo mounted on front for scanning with Ping sensor, better battery. Working on the programming and I will have video in the next few days.
Once I get a little better with the program and it gets a personality I will name it.
So the newest video is of what it does when I try the scanning ping code I cannot figure out why it does not have any drive on the left side. If anyone can possibly give me any idea what is going wrong I thank you in advance for the help. Here is the new code that has been cleaned up thanks to Geir Andersen.
Ok so disregard my second video and my plea for help I have gotten my current headache figured out. With much thanks to jlevous,Geil Andersen,and Chuck Crunch. I am still having a few problems and will be working on that in time. A little side note to any other beginners out there the servo libary in the Arduino disables the PWM on pins 9&10.
9/16/11 Just a little update. I have ordered my IR snesors there will be three. Two are going to be on the front corners pointed at 45 degrees from center to avoid hitting stuff at oblique angles. I am going to replace my Ping with an IR just to get use to working with it. I am debating whether I should turn this chassis into a differential drive wheeled bot because I have gotten tried of putting the tracks back on after they come off while turning. Or should I build a new chassis but that brings up other questions. Should I do front wheel drive with a caster wheel in the rear. Should I do rear wheel drive with a caster in the front. Or should I go with a centered drive with casters on both ends. I also ordered a compass module and will start playing around with that to see how I might be able to implement it into a bot.
I have also picked up a new book. Programming Interactivityfrom Oreilly so far it has covered the basics but it has helped clarify some things. I think this book will help me improve my coding greatly
Obsticle avoidance via a Ping UltraSonic sensor
- Actuators / output devices: Tamiya dual gearbox, self made motor driver
- Control method: autonomous
- CPU: Arduino Duemilanove
- Programming language: Arduino C
- Sensors / input devices: Ping))) Ultrasonic
- Target environment: indoors, Carpet and hard floor