Arduino Rover/Robot made from salvage.
This is a robot I built out of stuff I had laying around. All the software to control the robot is on the netbook. To use the robot you login with a remote desktop application like Teamviewer or Vnc. Once the netbook is connected and all the software is setup we program the arduino to accept keyboard commands on the serial port. Then use the joytokey application to send the PS3 joystick commands over the serial port using putty. The video feed is handled by a free webcam viewing app.
Here is a very broad list of parts you would need to build your own.
Hardware:
Dell netbook with broken screen
Arduino duemilanove micro controller
Pololu md03a motor driver
Webcam
Ps3 controller
Bluetooth adapter
Servo
LED Flashlight
2 - 3.6 volt cordless screwdrivers cut down to use just the motors and planetary gears
2 - 9.6v Ni-Cad batteries for motors
1 - 3.6 volt Ni-Cad battery for light
2 - R/C car tires
Misc parts:
4 - Conduit brackets
Nuts and Bolts
6 1/2" x 9" aluminum plate
Castor wheel
Hot glue
Connectors and wires salvaged
Software:
Laptop:
Winxp home - already installed
Motionjoy - for PS3 controller driver and bluetooth pairing
JoytoKey - for joystick to keyboard commands
putty.exe - to talk to arduino on com3
webcamviewer.exe - or any generic webcam app to view video feed
Arduino Ide - for arduino drivers and coding
Vnc software for remote control -, teamviewer, vnc, remote desktop.
Robot:
cut and pasted together code
The robot is very basic, The chasis uses two 3.6v screwdriver motors and planetary gears, attached to a 6x9" alluminum plate with conduit straps. There is a castor wheel in the rear.
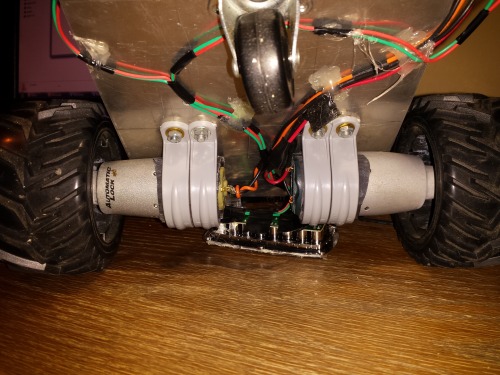
Attached to the top of the netbook we have the Arduino, Pololu Motor controller, Batteries and Servo with webcam.

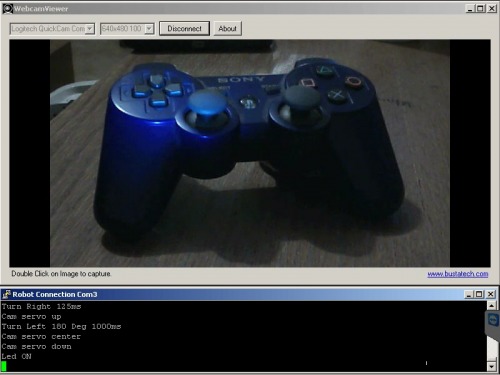
Here is a screenshot of the controls viewed through remote control on a pc or cellphone.
On the top is the webcam viewer app. On the bottom is putty.exe started from a shortcut
that connects to the arduino.