


Arduino Rover By PIKAj00
This is the arduino rover complete kit plus IR turret from www.robotshop.ca. I am useing the Motor shield from Adafruit to control the pan and tilt and 2 motors. Information on this Shield are here http://www.ladyada.net/make/mshield/ .
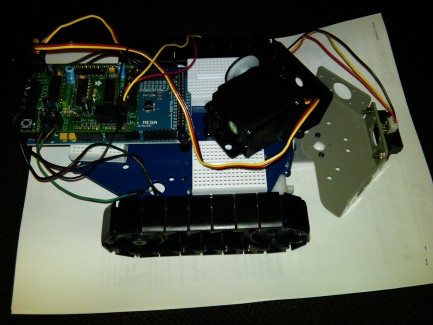
To drive the whole set up im passing on the default duemilanove arduino for the MEGA. this required to drill a whole in the chassis to mount it properly (Worked out amazing).
Here are some photos to show you what i have done so far.
Pan and tilt system is built with 2 HiTech HS-422 Deluxe systems servos and the kit that comes with the rover. its fast and works amazing. with the motor shield control is simple and works great. i will be mounting a sonar sensor on there. here is where you can get the sonar sensor. http://www.sparkfun.com/commerce/product_info.php?products_id=8501
This is an addon to the complete kit it does not come as is but can be purchased at the robot shop. In the picture you can see how easily a Sharp IR Sensor mounts. i will be mounting 2 more to complete the effect. i believe they say it gives you 270 degrees of coverage at the front. with the sonar thats kicking some butt. maybee over doing it but with the mega backend i have plenty of hook ups.
here is a picture of the Motor Shield mounted on the ARduino Mega. It can control up to 4 motors and 2 servos with an external power supply cant get any better than that. The Complete kit come with Pololu Dual serial motor controller but i found it much harder to write code for (im not a very good coder as of yet) so i opted for the Shield.
if anybody is working on simular project and would like to share code with me that would be great im still a little shakey on writeing code.
Here is a picture of the Sonar Detector attached to the pan and tilt system.
Also to power the rover im useing 2 lithium poly batterys. One powers the arduino and another powers the motors as the arduino +5 volt doesn not have enoughf curent to power the motors and servos. With these batterys i should be able to run forever lol. iv been running on test for a day now and still have juice left. the batterys are 800mAh.
Navigate around via Sonar and IR Sensors.
- Actuators / output devices: Hitec HS-422 Servos for Pan And TIlt System, Solarbotics GM9 gear motors X 2
- Control method: fully autonomous
- CPU: Arduino Mega
- Power source: LiPo Battery
- Programming language: wire/C
- Sensors / input devices: Sharp GPD12 IR X 3 and 1 Sparkfun Sonar.
- Target environment: Indoor and Out Door