


Arduino Robot - Quadruped - prototype - body kinematics tests
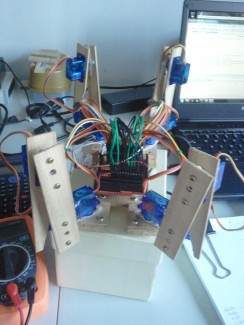
This is a quadruped robot in prototyping using seeeduino mega, 12 HXT900 hobby micro servos, 3.7V lipo battery. Materials used are all plywood secured with small bolts and nuts. Programmed with Processing and Arduino IDE.
The first clip shows the horizontal movement of the body and the corresponding reaction angles of the legs.
The second clip includes both the horizontal and vertical movement of the body and the corresponding reaction angles of the legs.
3.7V lipo battery is used to power the servos and the seeeduino mega runs off the power from USB.
Will be working on the walking gait soon.. when i have time..
Visit http://retardokiddo.blogspot.com/ for more projects and future updates!
- CPU: Arduino, seeeduino
- Programming language: Arduino, Processing
- Target environment: indoor