



Arduino Controlled Robotic Arm
I made an OWI robotic arm and controlled it with an arduino. Because I only had one dual h-bridge left over from the start here project I had to make switches to control the robotic arm with servos. The switch to control the base rotation motor looks like this when the arm is rotating clockwise:
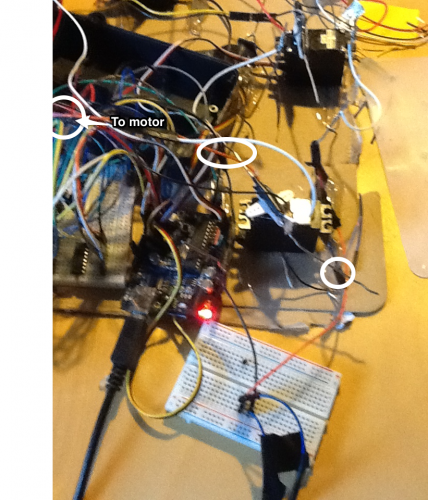
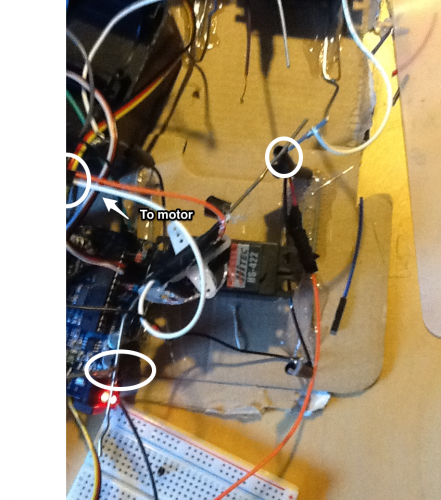
and like this when the arm is rotating counterclockwise:
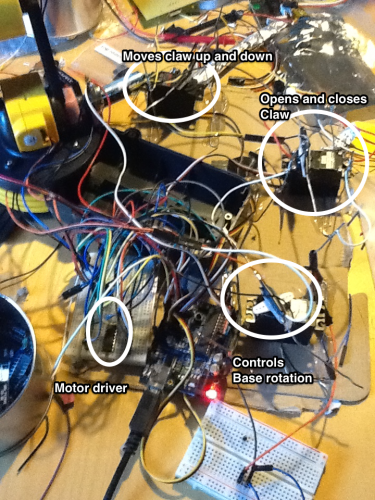
here is a picutre of the motor driver and the switches:
I am thinking of adding potentiometers to make the arm movement more precise.
picks up objects
- Actuators / output devices: geared motors
- CPU: ATMega
- Power source: 9 volts from wall
- Programming language: C
- Target environment: indoor