


arduino controlled robot with ping sensor
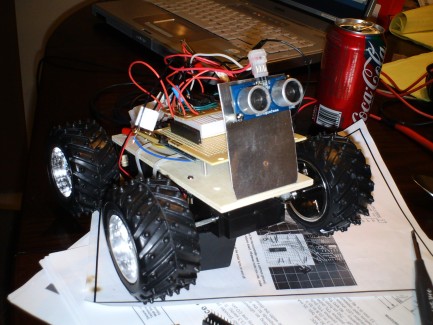
This is my first robot. It uses the Arduino Diecimila. It also uses a ping ultrasonic sensor to detect objects in front of it. For motor control I used the SN754410NE. I mounted the chip on a dip ic board, that I then mounted on a home made arduino proto shield. I use a 9 volt battery as the motor voltage source and 4 AA batteries as the Arduino voltage source. My goal now that I have gotten this far is to add a servo to turn the ping sideways and to add more to the program. Right now it only goes forward and reverse. I hacked a remote control truck for the wheels and used a piece of wood to mount everything on. I'll post more details later. Pretty crude right now, but it's taken me a while to get to this point. Thanks for reading.