


Ardbot
Still a work in progress. I'm just testing out the various subsystems (wireless, camera pan & tilt, tracks, IR distance sensor). I've attached some pictures of the pd patches i'm using to test things out - hopefully someone will find them helpful. It took awhile to figure out how to read data across the bluetooth serial port using pd but it works well.
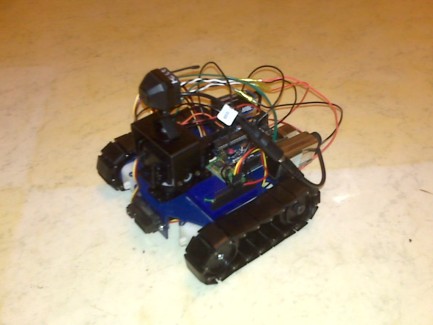
I started with the Robotshop rover development platform kit from robotshop.com. I added the Bluetooth Bluesmirf Silver modem from sparkfun.com for the wireless goodness, and the wireless micro cam from boostervision.com.
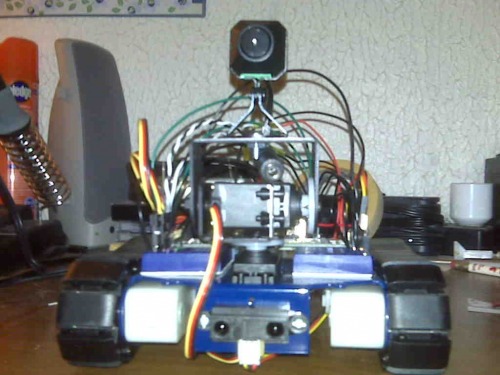
Here are a couple more pictures - sorry about the image quality, it ain't that great:

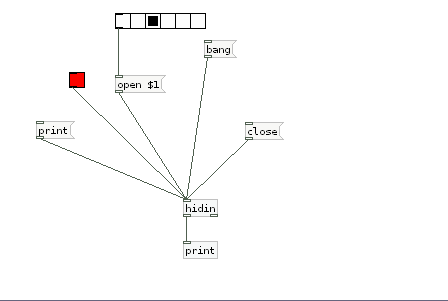
The cool thing about programming with pd is that it's totally visual, so with a little practice you can program without all of that tedious typing. Here's a test of the game controller - really just testing to see that pd can acquire the controller and print out the controller's capabilities to the pd console:
this pd patch reads data from the Sharp IR sensor on the robot via the Bluetooth/Serial port link:
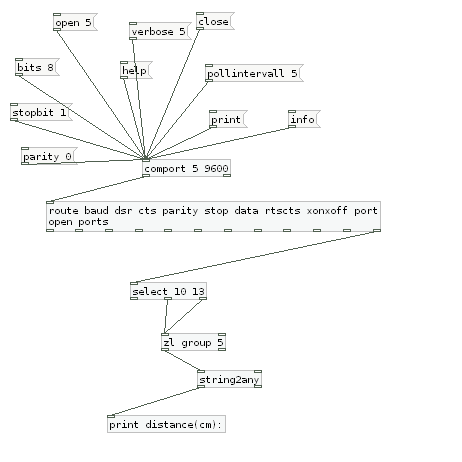
There's a simple program running on the robot's Arduino controller that is polling for data from the sensor and transmitting out via the bluetooth modem.
At some point, I'll wire everything together and post to my blog.
PC interface, wireless navigation/control, live video!!
- Actuators / output devices: 2 Hitec HS-422 Servo Motors for camera pan/tilt, 2 Solarbotics GM9 - Gear Motor 9 for tracks
- Control method: Bluetooth, PC, Philips PC game controller
- CPU: Arduino Duemilanove
- Operating system: windows XP
- Power source: 4 AA batteries, 2 9v
- Programming language: Java, Arduino, PD (pure data)
- Sensors / input devices: Sharp GP2D12 IR Range Sensor, 2.4 Ghz Wireless Micro Camera
- Target environment: indoor