



AniHand - Animatronic Hand
This animatronic hand started life as a lofty ambition to make controllable skeleton hands as part of a Halloween costume. The fingers were built by first chopping model aircraft hinges to length and joining them with a short pin down the centre. Polymorph was warmed up and cut into long thin strips which were wrapped around the hinges to lock their orientation (carefully avoiding the hinge itself). Brass tube was cut and formed to act as guides for fishing line. Instead of going for a two-wire approach I went for four-wire, with a line running from each joint back to a servo and a fourth line running down the back of the finger to a spring to return the finger to the fully extended position. Polymorph was applied over the brass tubes to hold them in place and flesh out the bones of the fingers. Once I had the fingers made I joined them to make a hand using yet more Polymorph. This time it was warmed up, rolled into long slender sausages and arranged to extend each finger before flattening out and joining with the other fingers.

Once I reached this state the project hit a dead end and was shelved. I did order the servos but didn't do anything with them until June 2012.
Brains before brawn
The inspiration to resurrect this project came from a Maplin clearance sale (Maplin being the UK high street electronics/components shop), selling discount Arduinos and shields. I'd seen plenty of projects which used Arduinos on hackaday and similar but hadn't before given any thought to buying or using them myself. I had a quick look online and determined that I'd splash out on an Arduino Mega ADK and a few shields.
Give it some muscle
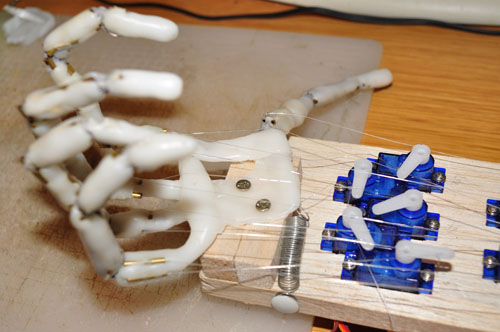
Not having thought out how I was actually going to mount the servos I decided to throw caution to the wind and just slap them all on a bit of balsa wood. The material is cheap and very easy to work with so I figured I wouldn't lose much if it didn't turn out. Mounting 15 servos took a while but I was pleased with the result. I mounted the hand at the end of the balsa wood and strung up each of the fishing lines to a servo horn.
Hooker Up
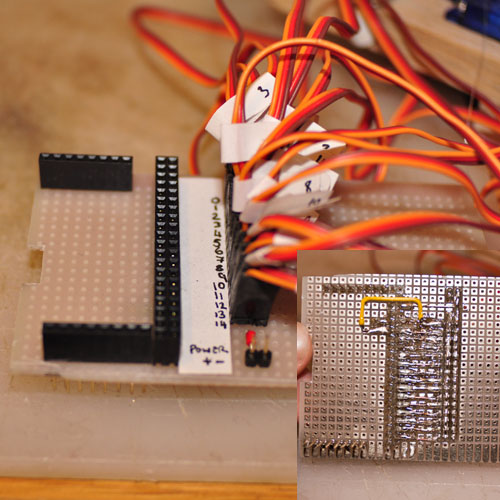
Hooking the servos up to the Mega was done with the use of some perfboard, I'm used to using the stripboard variety (copper traces running the length of the board) but this was my first time with a board that only had copper spots around each pin hole. I struggled through (mostly due to a lack of flux, though at the time I thought it was the iron or my technique or something else) and ended up with 15 x 3-pin connectors each with a data connection to the end of the Mega. Power was supplied to the servos from four D cell batteries.
Going software
I bought a few Arduino books for my kindle and speed read them, I tried a few tutorials, looked over a bunch of examples and figured I was ready to jump in. The Arduino code was going to need to control a lot of servos in some sort of order, I wanted manual control so I wired up a Wii Nunchuck and an LCD to the Arduino and implemented a rudimentary menu control system. Press one button and it cycled through different control techniques: single servo, single finger, whole hand, animation skit. The other button when held down would enable the joystick and in turn set the position for the currently selected servo or group of servos. Tilting the nunchuck left or right would change which servo/group of servos was selected.
What now
When I had the system working I didn't spend any more time on the physical hand, though it still needed some attention (the thumb was missing some key pieces of brass tube and the springs were actually cutting the fishing line into the balsa wood as the fishing line wasn't guided towards the fingers properly. Instead of fixing these shortcomings I branched out my code to take input from a PS3 controller via USB and when that worked I moved on to using my Android phone over USB. I got the latter working with an app called Handbag, which lets the Arduino do most of the leg work. I bought a bluetooth dongle and then got the PS3 controller working wirelessly. I haven't done much to the hand since August and I've been sorely tempted by hairygael's InMoov hand since I started tinkering with 3d printers but I'm determined to go back and finish off this skeletal animatronic hand... eventually. Before I do I've got a few more project ideas bursting to get out of my head and take shape.
Animated hand
- Actuators / output devices: SG 90 Tower Pro 9g Servo
- Control method: PS3 SixAxis Controller via Bluetooth, PS3 SixAxis Controller via USB, Android phone via USB Accessory (Handbag App), Wii Nunchuck
- CPU: Arduino Mega ADK 2560
- Power source: 9v PP3, 4x D cells
- Programming language: Arduino C