


Anedubot
I'm working on an educational robot: Anedubot.
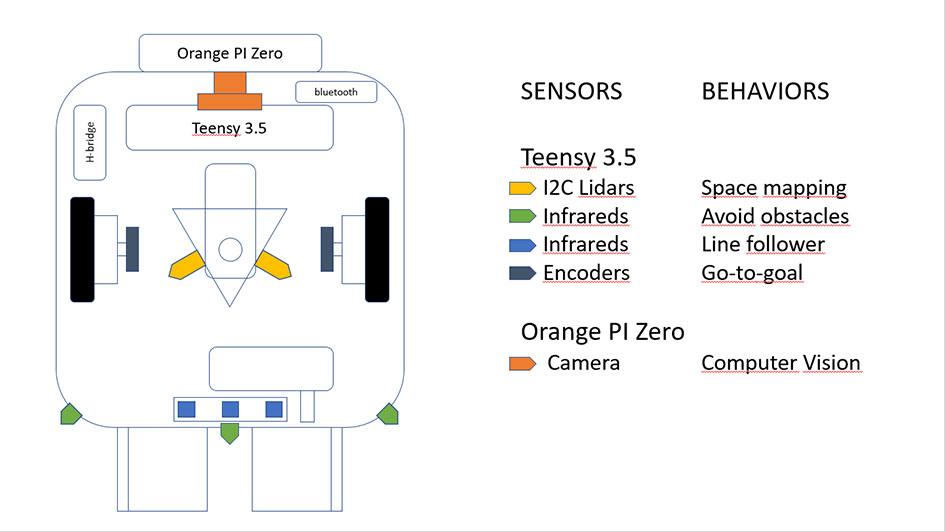
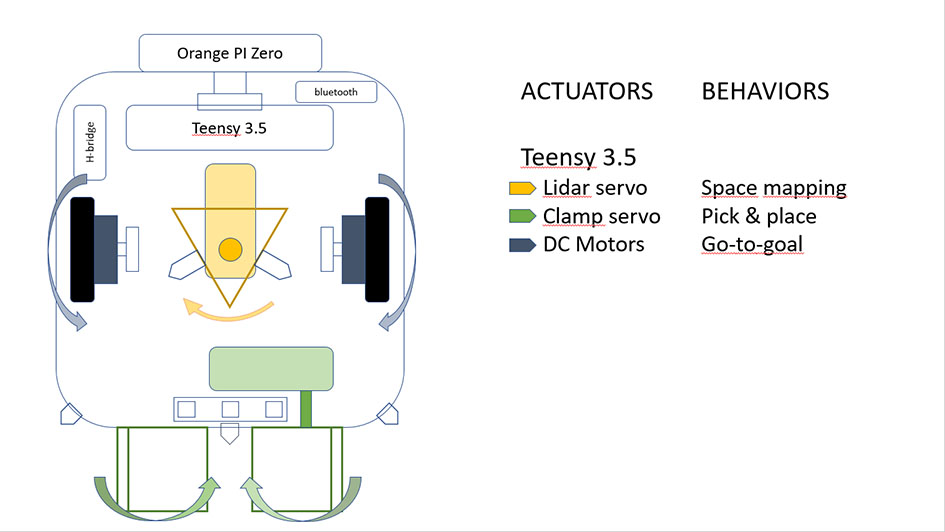
Anedubot is designed to achieve different behaviors:
- G-to-goal.
- Avoid obstacles.
- Line Follower.
- Object detection.
- Pick & place.
The build process is documented in the link below:
https://github.com/snailstorming/anedubot
https://github.com/snailstorming/anedubot/tree/master/Building
I appreciate any suggestion or improve. I would be very useful if someone tries to build it and he sends me some feedback.