The Remote
- Uncommented 'If gloopFrame = 0 Then Play(Low_ID) for play sound when low battery
- Power button is automatically activated
- a better algorithm for Async newdata is needed
There are 2 files created. One paired file (bot are stored in it for a next connexion) and a INI file with the name of each robot...
it's for pre setup like default knob value (speed , height )
Different screens
Press Left or right to select Quit or Yes
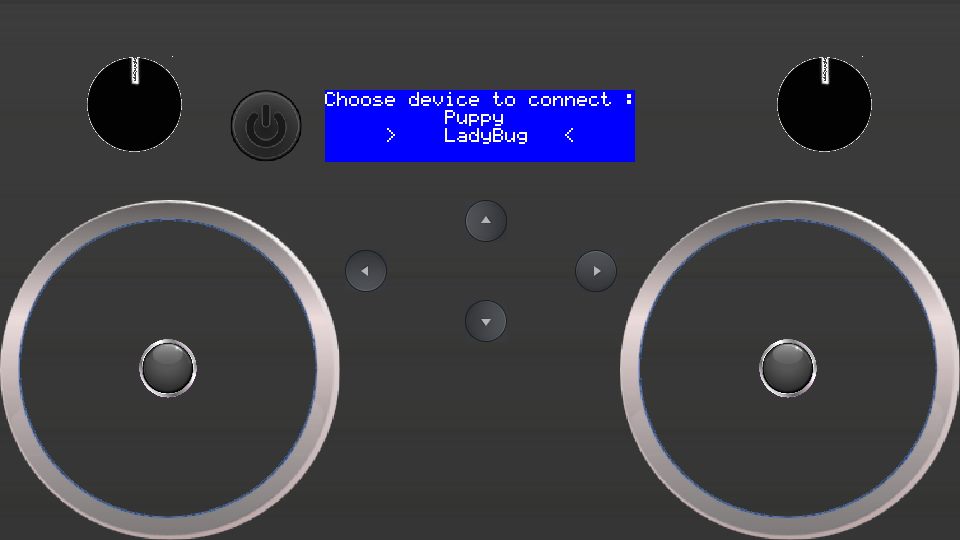
Press Right to select, up and down to scroll in the list of detected bot

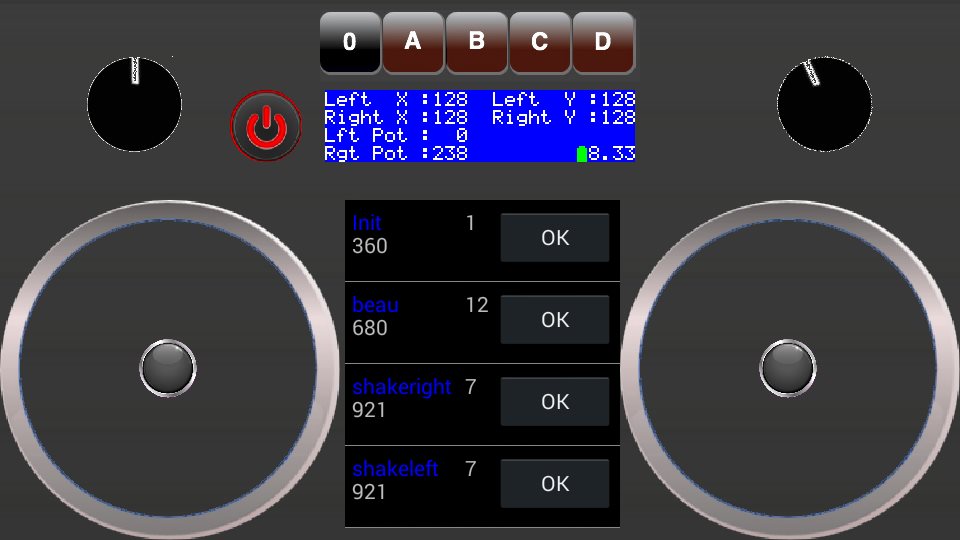
Puppy mode with a sequences file loaded. It's a scrollview