



AluminuM
Hello,
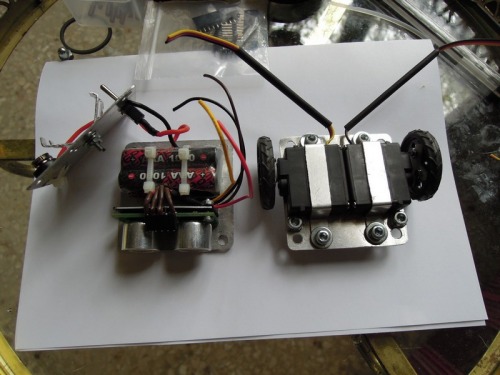
I present Aluminum autonomous robot, it rolls around without purpose just to avoid the wall into the body.
It is built with an aluminum frame, two modified servo, 1 SRF05 ultrasound, 1 red LED and picaxe 08M2.
The SRF05 is connected in single pin on C.4
C.0 = led
C.1 = servo 1
C.2 = servo 2
C.3 = nothing
C.4 = SRF05
Programming is in progress ....


Navigate around via ultrasound
- Actuators / output devices: 2 servos modified for continuous rotation
- Control method: autonomous
- CPU: PICAXE 08M2
- Power source: 4 AAA Rechargeable Batteries
- Programming language: Picaxe basic
- Sensors / input devices: SRF05
- Target environment: indoor