




We were in our second year of engineering degree, when we made our first remote controller. It was used with a robot we made for Robocon 2013 (in Asia, not to be confused with Robocon in the US). Our robot had many things that we needed to turn on and off. We had many pneumatic cylinders and 3 vacuum cups (made out of handheld vacuum cleaners). Our robot had omnidirectional wheels so we used a potentiometer to control its rotation over its center. We managed to find a +4 rounds potentiometer (+1440 degree) so it made everything very easy because we could easily spin more than 2 rounds in each direction (if we started at center). The single joystick on the controller was used to move the robot around the game field. We cannot recall what the red push buttons were doing but we are sure they were doing something :)
This remote controller was extremely uncomfortable to hold. So we wanted to fix this issue in the next remote controller.
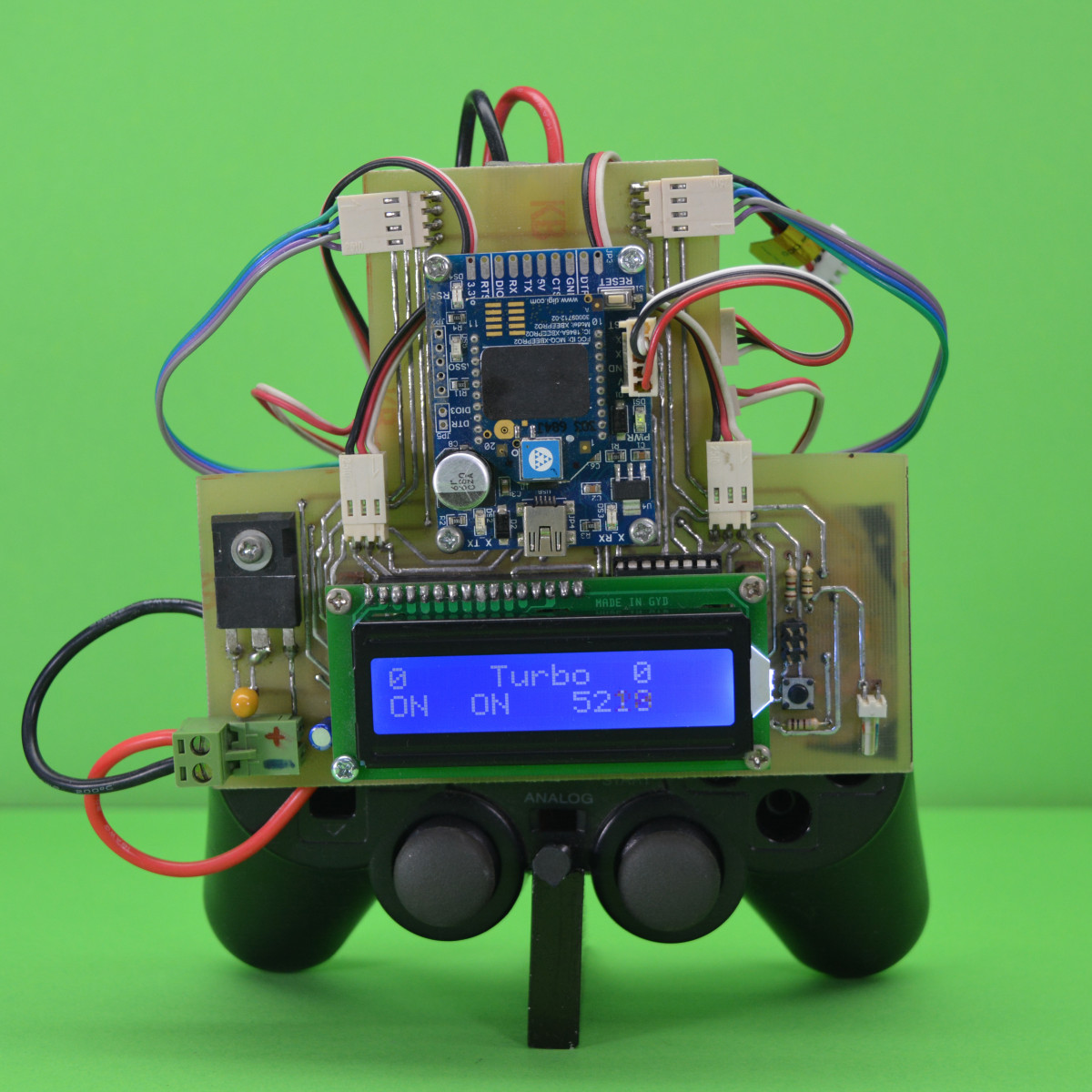
From the previous remote, we noticed that ergonomics of the remote controller is very important. Not having too much engineering experience at the time, we decided to build on top of a PS2 controller. Few months later, we understood that it was a bad idea. Even though PS2 controller is very ergonomic, as soon as you add anything meaningful to it, it is not ergonomic any more. Not to mention that adding parts to PS2 controller is a very challenging task by itself.
In 2013 this remote taught us so many things. We got better at PCB design and PCB fabrication. Also we started using Arduino products for our projects. We improved our coding skills and we were ready for more.
This remote was designed to work with our combat robot, Mark II. The controller allowed us to control the joystick sensitivity, turn On/Off the internal compressor and open/close the pneumatic valve in the robot. You can find more information about Mark II at : https://www.craetech.com/project/mark-ii-combat-robot/
We wanted to make a new remote controller with better features and more ergonomic design.
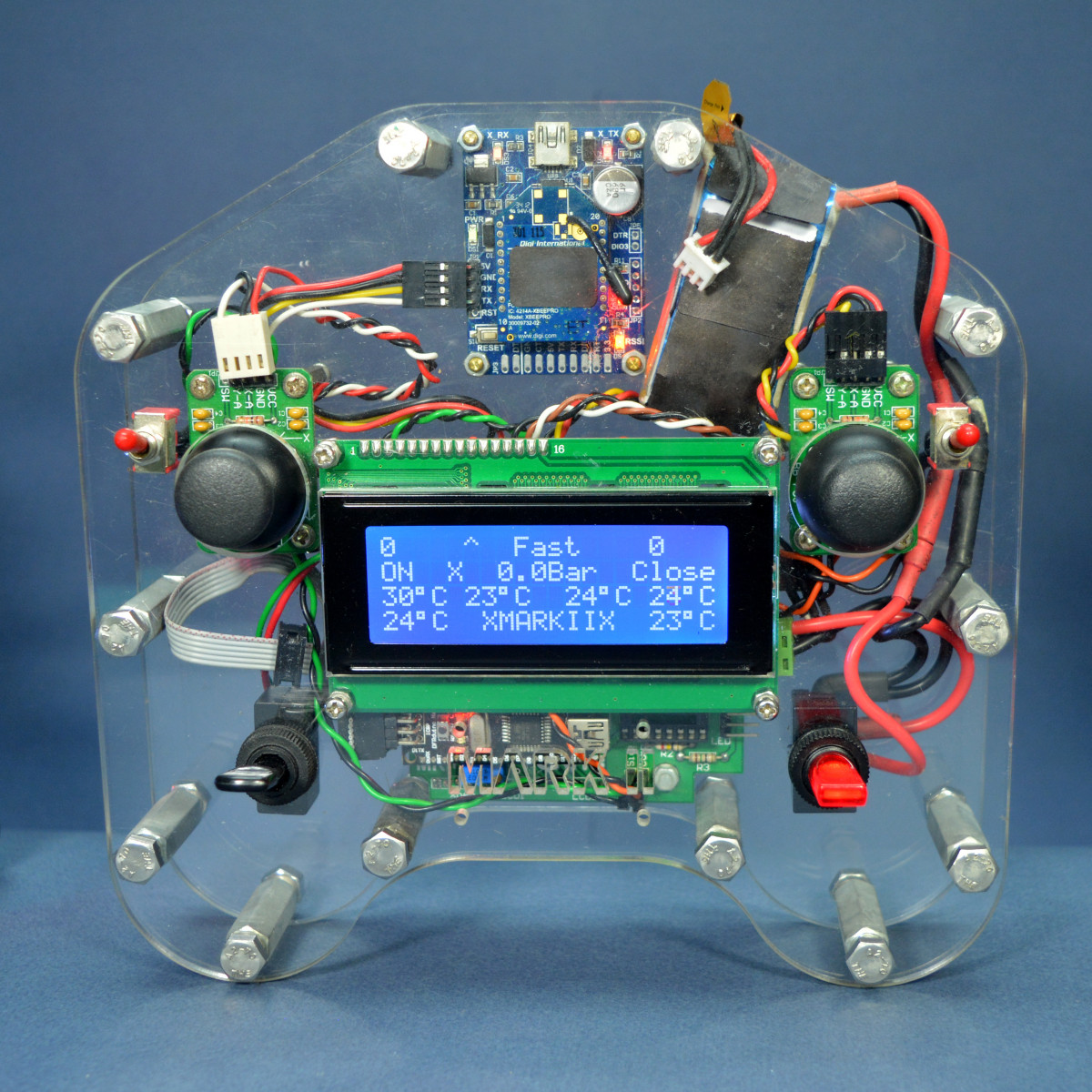
From 2013 to 2014 our team was building robots and cool projects all the time, so our engineering knowledge was building up pretty fast. In 2014, we build this remote controller to control Mark II and to replace the PS2 controller. This time around, we first made a paper model to make sure it would be easy to hold. We spent many hours to optimize for both fabrication cost and ergonomic design. Eventually we ended up with the controller you see in the picture.
Many people loved the controller when we were attending compositions and exhibitions. At the time, this remote controller was only usable with Mark II and for other projects we needed to customize the code. We never considered the big picture and we ended up customizing the code all the time for each project.
In 2017, after graduation we started to think about our beloved remote controllers and seeing that the market still does not offer any solution, motivated us to build the ultimate remote controller. Our previous experience served us really well.
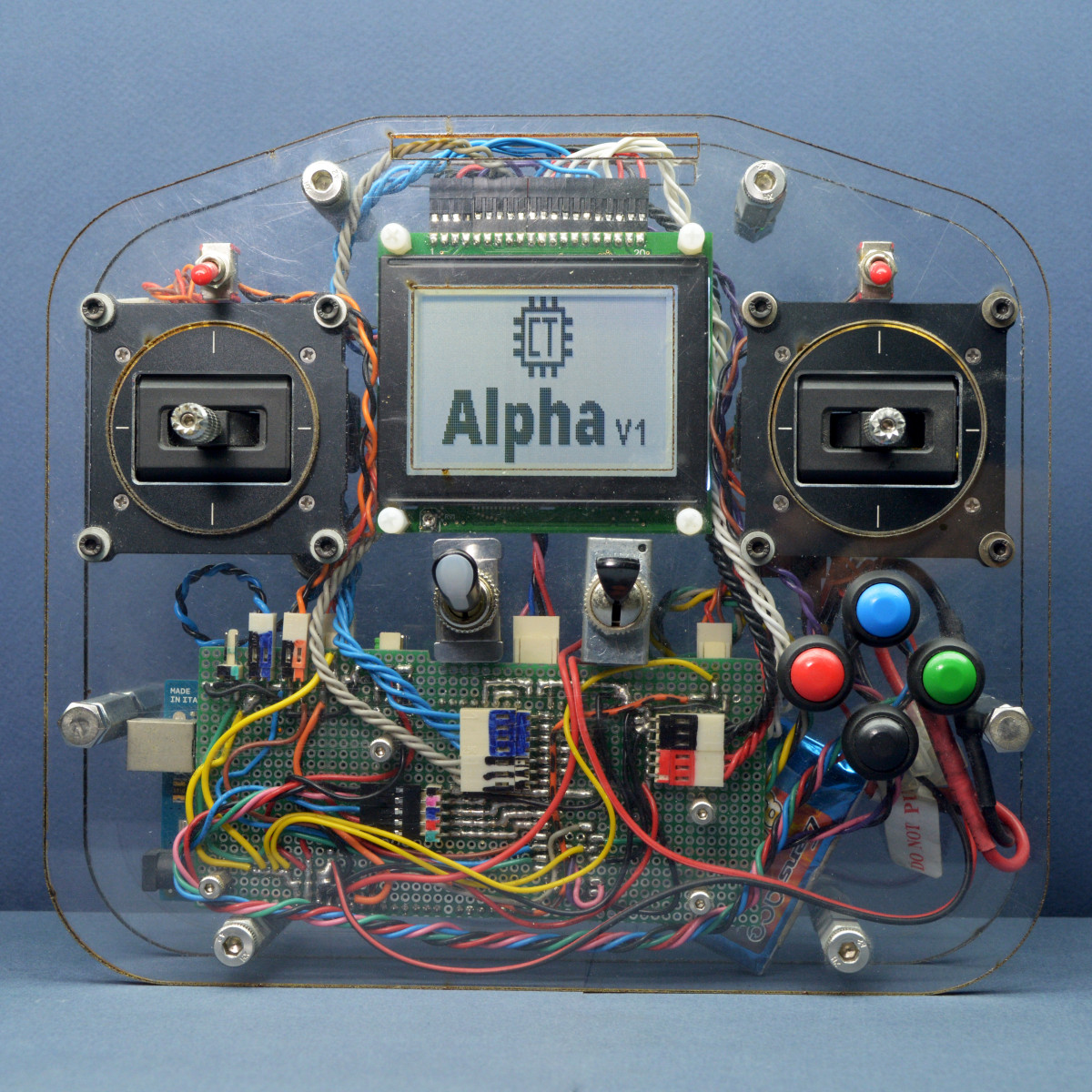
We designed and fabricated Alpha V1's first prototype mainly to make sure we develop the software required to make Alpha V1 compatible to various projects. We have developed more than 500,000 lines of code for Alpha V1 and in the process we defined a new working scheme for the remote controller (very different from what is found in RC transmitters). Many different input devices can be connected to Alpha V1 without the need to write a single line of code as a result of the development done. So, you can use your favorite switches, buttons and joystick easily.
We also made sure changing from one model/robot to another become as smooth as possible. Also, we tested our selected hardware to make sure they deliver what we expect them, even after many hours of operation. We developed features that come handy for most robotic application and we are still open to suggestions. You can reach to us through this page, social media (FB, IG) or our website for all kind of suggestions.
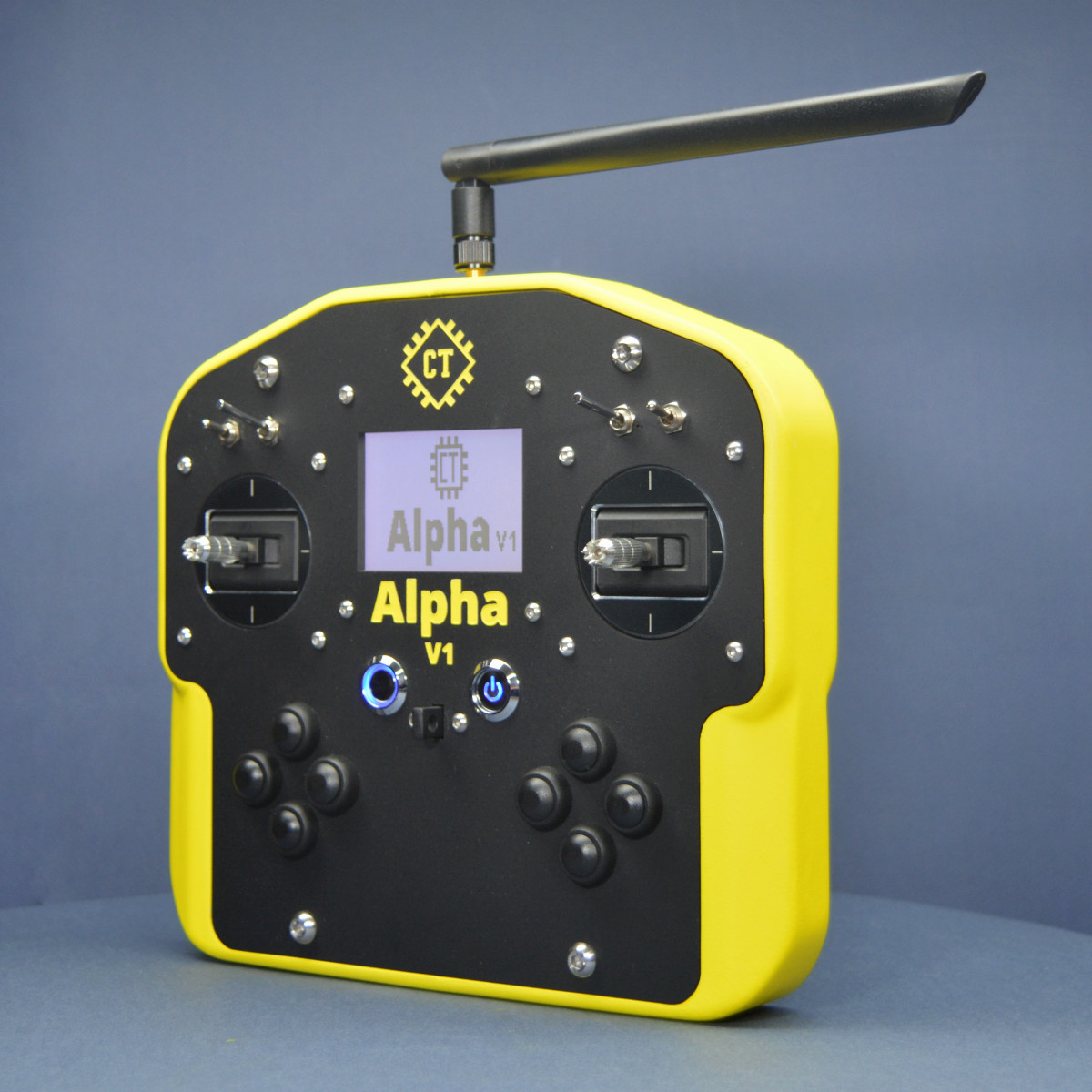
After completing this stage, It was time to face lift Alpha V1 for a better looking version while keeping its core values in place. Even after face lifting we wanted to make sure that users can modify their remote controller easily unlike RC remote controllers that come out of a mold.
We have completed most parts of Alpha V1, but we are still open to suggestions. Let us know what you think and if you have any suggestion we would be more than happy to hear it. You can either write to us through this page, our social media pages (check the links at the end) or our website.
Currently 80% of the programming for the controller is completed.
90% of mechanical design and fabrication has been sorted out.
85% of the electronics hardware design is completed and we are adding hardware for far future features.
In summary, Alpha V1 has the following features:
- Design with Robotics Applications in Mind
- Designed to be Modified Easily
- Strong Code-Free Customization
- Simple User Interface
- Superior Communication System
- 2 Way Digital Communication
- Channels' flexibility (8 channels at 100Hz or 36 channels at 50Hz...)
- Advanced and Flexible Telemetry
- Open-Source All the Way
- Open-Source Software
- Open-Source Hardware
- Arduino Compatible
We are planning to crowdfund Alpha V1 eventually. If you want to get notified at launch, sign up at: https://www.craetech.com/alpha-v1/
If you want to see more pictures and content about Alpha V1, follow us on our social media pages.
Fb: https://www.facebook.com/craetech/
IG: https://www.instagram.com/craetech/