


AGV
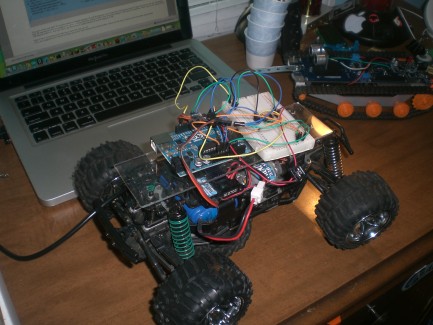
So this is my latest robot that I am working on. It consists of an arduino uno, 2 servos from the car and a Memsic 2125. I bought the memsic 2125 form radio shack. This is a good radio controlled car that has an electronic speed controller and I transformed into a autonomous ground vehicle. I took both servo wires out of the receiver board on the car and then hooked up each wire to the arduino. The orange wire is the signal wire, the brown wire is ground and the red wire is regulated or un-regulated power. I measured the red wire coming from the esc(esc = electronic speed controller) . The power is around 5.28 volts from the wire which is perfect to power my setup. I mounted all of my electronics onto a 20 cm/ 5cm plexiglass board which I got free from my hardware store. I got it free from the manager because it was just a small scrap piece. (: I drilled 5 different holes, 3 holes for to mount onto the car and 2 holes to mount the arduino uno onto the board. I hooked up the memsic accelerometer and found a program that controls the servo with the sensor. I plan on making a controller for the memsic 2125 accelerometer and adding a xbee to both the controller and the agv. I also would like to eventually turn this into a gps guided vehicle, with a compass and gps. I am almost done with school and I will have more time to work on this robot and my other robots.
Video to come soon.
Photos:
- CPU: arduino uno
- Power source: 5 volts
- Sensors / input devices: memsic 2125 accelerometer
- Target environment: outdoor, indoors