



Adsumoto - MiniSumo Robot
Hi,
This is my first robot.
It's a minisumo robot but as you can see it's more than 10cm long. But when the combat starts it fits into the 10x10 square by lifting the front scop.
It also has a LCD screen which allows me to see the readings of the sensors, test some moves, change the speed of the robot, select different strategies... I think it's very useful.
On the 27 April I went to his first championship on Robolid 2012 in Valladolid (Spain). Adsumoto lost the two matches becouse the wheels don't provide enought traction.
Next week I have another championship in Barcelona so I have to improve the tires of the wheels. Any idea to improve the traction?
Thanks!
30/04/2012
I have added a video of the Robolid tournament.
01/05/2012
I will try to explain how I built the robot.
First of all I looked for information. I watched a lot of sumo robot videos on youtube, read about robots in letsmakerobots... It all gave me an idea of what have been done and what was posible to done.
Second I decided the hardware I was going to use in the robot. I chosed the motors, wheels, sensors, batterys... I made a list of the different options and decided the one who fitted best to my idea of the robot.
Next I designed the robot using SolidWorks. Below there are some pictures of the desings. In my opinion SolidWorks it's very useful becouse you can create models of the motors, sensors and then design the chasis. You can make changes easily and fast.
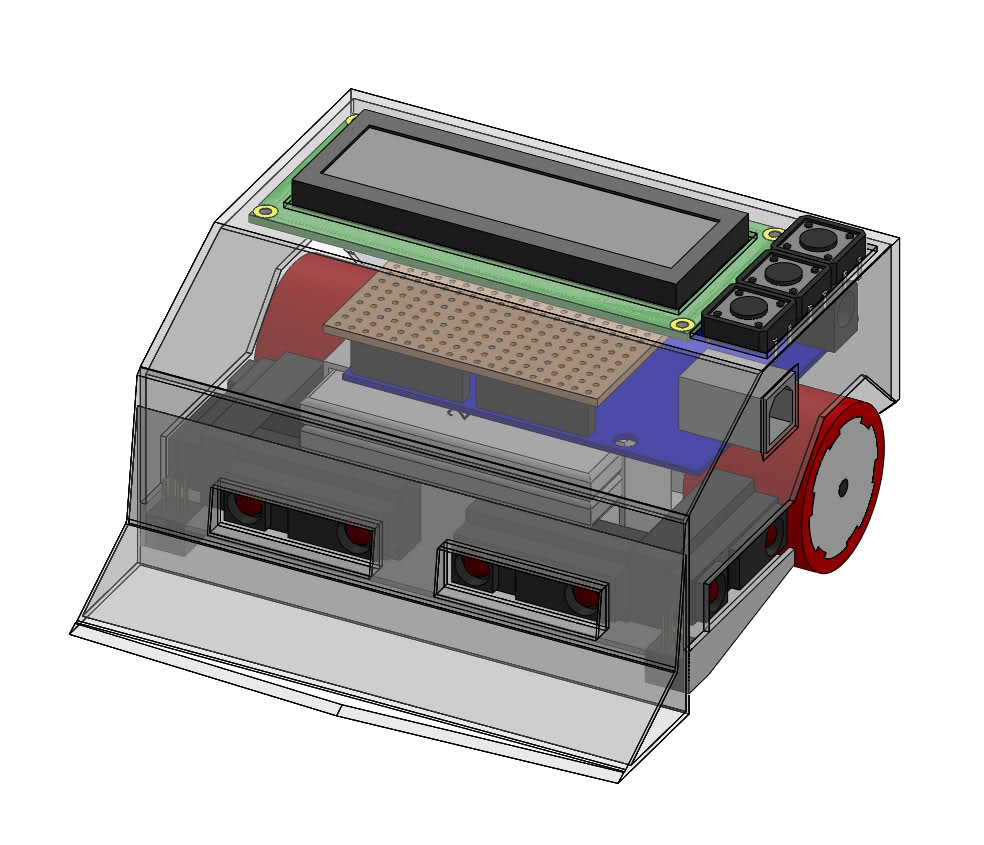
This was one of the first designs,
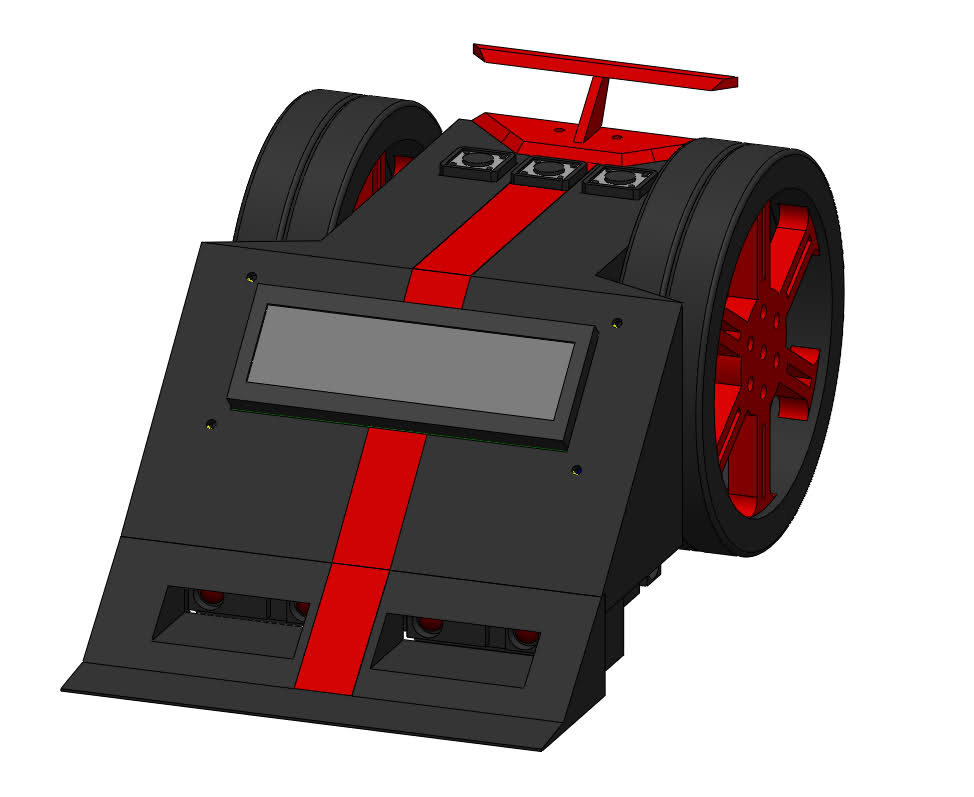
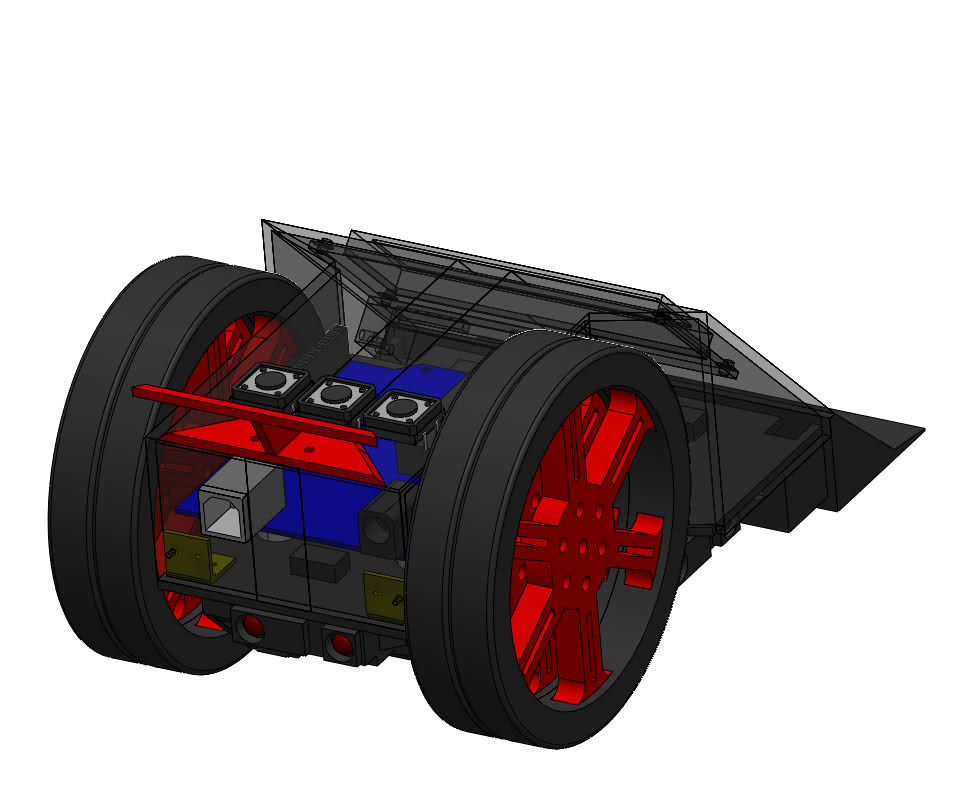
This is the final design. I have only changed the colours.
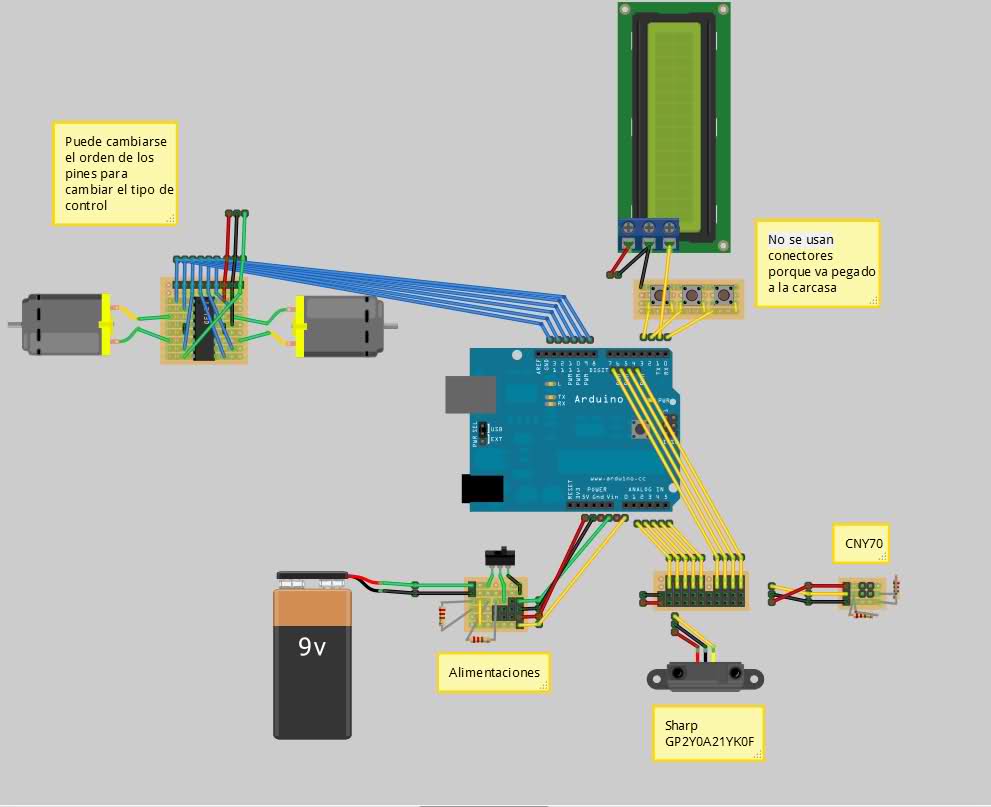
I also designed the circuits using Fritz. It's free and it has the most common elements such as Arduino, Sharp Sensors...
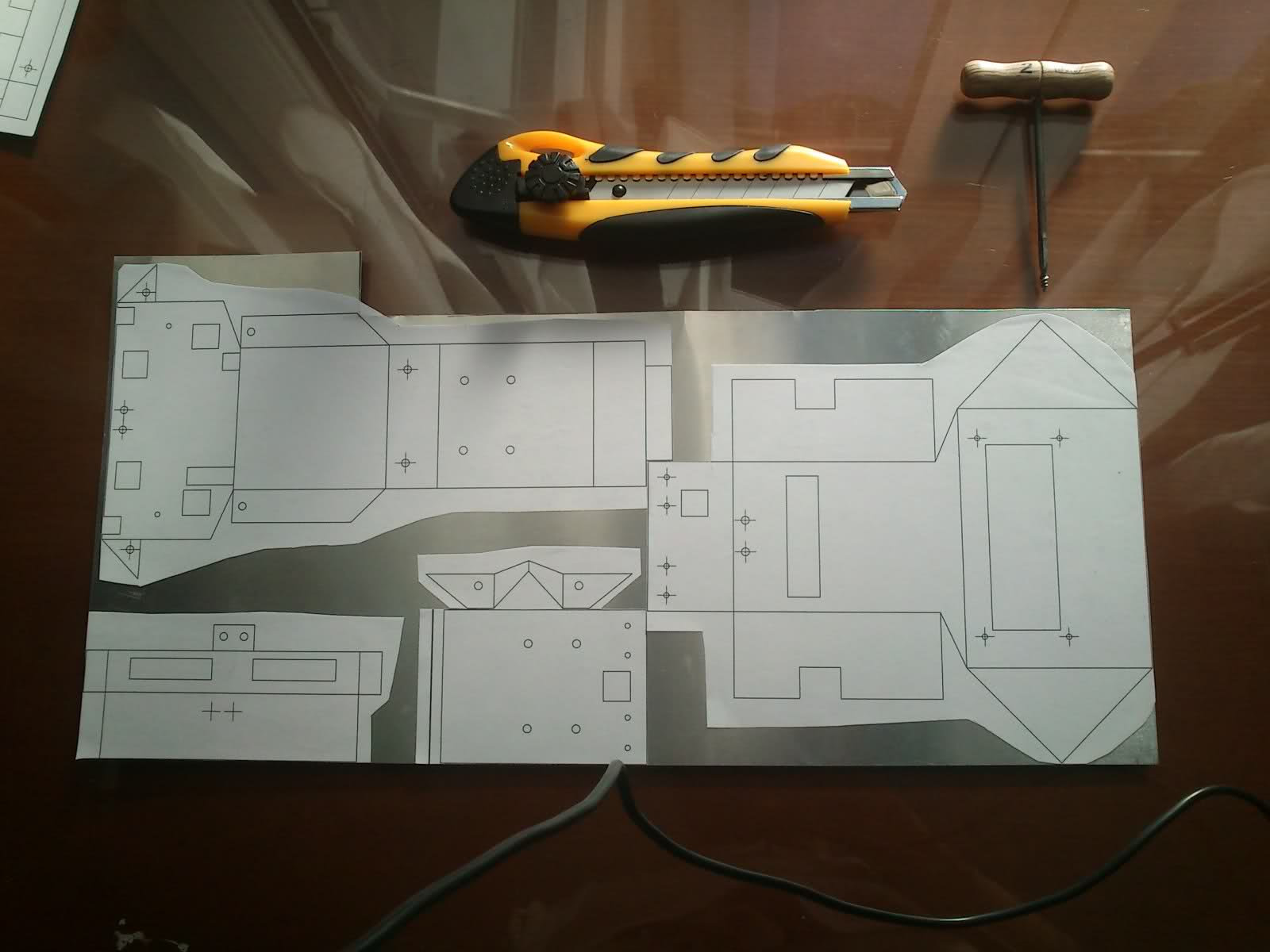
Then I build the chasis. I used aluminum sheets which I cut using a cutter and folded to make the parts I wanted. Below there are some pictures that will show you how I made it. I glued the different parts using Nural 21


09/07/2012
I have attached de Arduino code
MiniSumo
- Actuators / output devices: 1:150 highpower mini metal gear motor
- Control method: Full autonomous
- CPU: Arduino Duemilanove
- Power source: 7, 2 1000 mAh LiPo Battery
- Programming language: Arduino Processing
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor, Cny70 IR sensor
- Target environment: Dohyo