



ADET 2.1 (in Spanish "Analizador De Entornos Terrestres")
hi this is my project is a robot that is already finished but I'll upload the parts when I have time
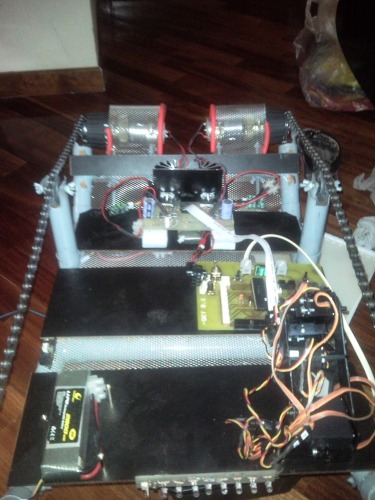
I was in the (European campus party) with the robot and finally is already 100% completed
I hope you like it
The realization of electronics has been left "open" so that in future versions or other projects can be used by the Motherboard which is what controls the entire robot system and analyzes information received by its sensors, which are four GPD2, A accelerometer, a GPS module and a camera with microphone built-in humidity and temperature sensor.
the robot's movements are divided into two types:
Movement Servos:
This plate is made with Call SD20, which uses a PIC 16F872
Preinstalled leading a program that allows you to control 20 servo motors
I2C communication,
Truck Movement:
The movement is done with two bridges and two L298 H, its speed. It is controlled by a PWM signal.
It also incorporates a lighting system to enhance the visibility of the CamaraIP and night vision.
The structure of the robot consists of copper pipes
in the video I am the robot with bicycle chains

Painting
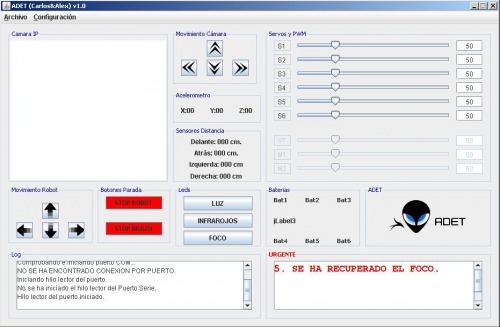
the program is done in java sunwas not easy but I had help from some friends
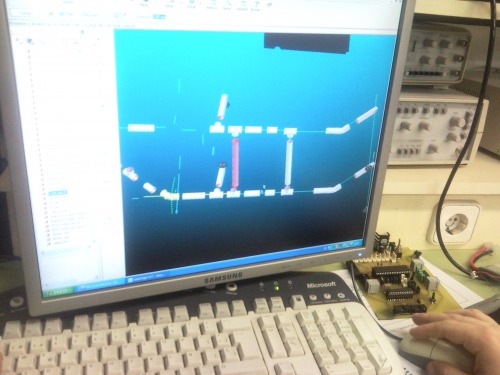
robot design I did with the program solid edge
this is the version 1.0

this is the 1.9 version
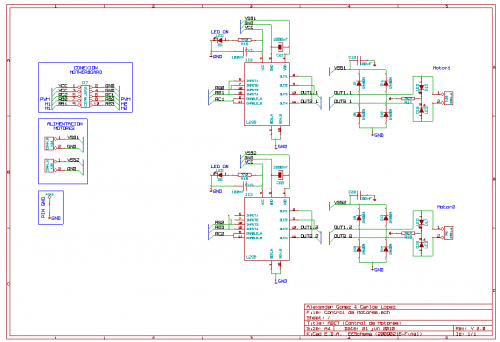
Motor Control
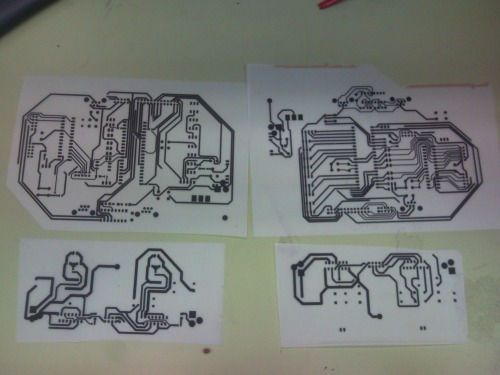
This motherboard has two L298N for each motor (drill motors)the Cicuit is the same for each engine:
Are parallel inputs and outputs to increase the Amps per channel
between Gnd Vss has a capacitor 1000μf to prevent voltage spikes
this is the scheme:
Download:
http://www.megaupload.com/?d=2NFGELQZ
I will upload more things
forgiven for not write English well
is a robot that analyzes the environment(is a robot that analyzes the environment)
- Actuators / output devices: 8 servos and 2 Drill motors
- Control method: IR, Serial (RS-232), EasyRadio
- CPU: Pic
- Power source: 3 lipo 11, 3 2300 Ah 2 lipo 7, 4 1000AH, 3300AH
- Programming language: Assembler
- Sensors / input devices: 4xSharp IR GP2D12, MMA7260QT 3-Axis Accelerometer ±1.5/2/4/6g, Flammable Gas & Smoke Sensor MQ-2, L298N Dual Full-Bridge Motor Driver, PIC 16F877A, PIC 16F876, SD20(PIC PIC16F872)